Kantenerkennung in Matlab: Vergleich zwischen Canny Algorithmus und Betragsoperator
Juni 04, 2012
0 Comment
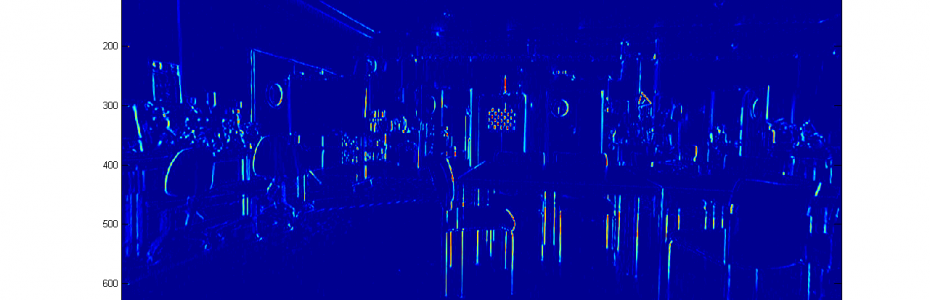
Um visuelle Umfeldwahrnehmung in Echtzeit betreiben zu können, muss die Datenmenge, welche von einer Kamera erzeugt wird, zur weiteren Verarbeitung drastisch reduziert werden. Ein Bild ist nichts anderes als eine Matrix, in welcher für jedes Pixel die 3 Farben rot, grün, blau abgespei
Weiterlesen →Autonome RC-Car Spurführung mit CMUcam3
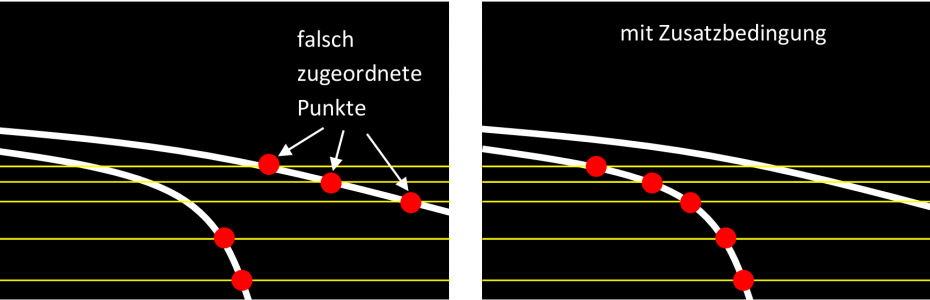
Überblick Mithilfe einer CMUcam3 wurde eine autonome Spurführung für das isupia Modellfahrzeug realisiert. Eine solche Spurführung erfordert zum einen eine zuverlässige Erkennung der relevanten Spur, zum anderen eine möglichst hohe Aktualisierungsrate für die Gewährleistung einer dyna
Weiterlesen →Lens Undistortion der GoPro HD Hero2
März 16, 2012
Nicht nur Fotos können entzerrt werden, auch Videobilder sind durch den Weitwinkel der GoPro HD Hero2 natürlich stark verzeichnet. Diese Verzerrung (engl: Distortion) kann und sollte heraus gerechnet werden, wenn man im Videobild geometrische Objekte in 3D Koordinaten wiederfinden möc
Weiterlesen →Intrinsic Camera Parameter für GoPro HD Hero2
Zur Ausstattung des Labors gehört eine ultrakompakte GoPro HD Hero 2, welche mit 170° Öffnungswinkel eine exzellente Abbildung des Blickfelds des Fahrers wiedergeben kann. Das Problem einer jeden Kamera ist die Verzeichnung, welche sich durch das Objektiv ergibt. Nachfolgend ist besch
Weiterlesen →12
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de