Sensordatenfusion mit Extended Kalman Filter (EKF)
Oktober 02, 2017
0 Comment

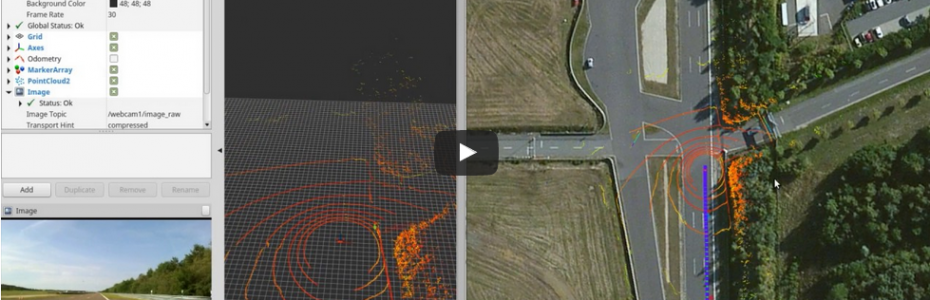
Im Rahmen der Nachwuchsforschergruppe wurde ein erster Entwurf eines Erweiterten Kalman Filters (EKF) implementiert. Dabei werden Positionsinformationen von einem GPS-Receiver (ublox 6T) und Fahrdynamikdaten (Abgriff Fzg. CAN Bus) im Livebetrieb fusioniert. Als Systemmodell wird dabei
Weiterlesen →Platooning mit IPG-Truckmaker und MatLab/Simulink
September 29, 2017
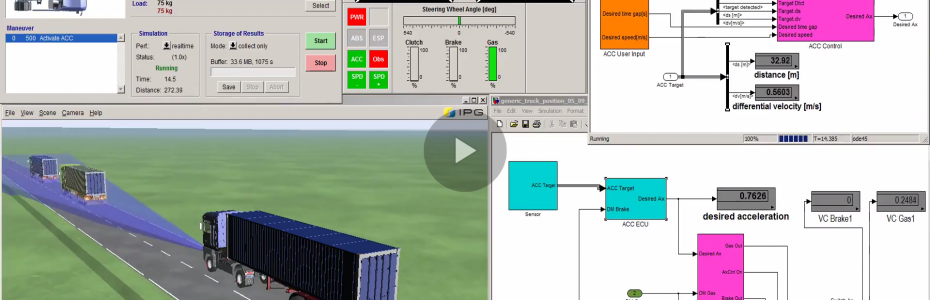
Allgemein: „Nutzfahrzeug-Platooning“ ist eine der nachhaltigsten und erfolgversprechendsten Zukunftstechnologien in der Logistikbranche. Dabei werden mehrere Lkw in einem Verband zusammengefasst und der Sicherheitsabstand zwischen den einzelnen Fahrzeugen wird reduziert. Diese Reduzie
Weiterlesen →Using SUMO with OpenStreetMap
August 25, 2017
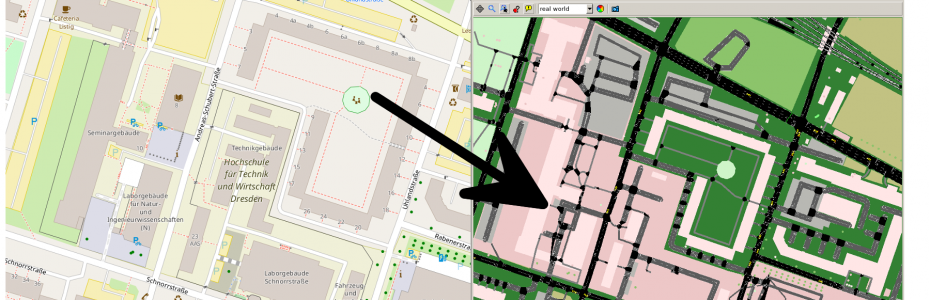
1. Preparation 1.1 Install SUMO using instruction from http://sumo.dlr.de/wiki/Installing. Binary packages are available for Linux, Windows and MacOS but if you want to extend SUMO I recommend to build from source using the instruction from http://sumo.dlr.de/wiki/Installing/Linux_Bui
Weiterlesen →Fahrdynamisches Praktikum Klettwitz
Juli 12, 2017
Vom 6. bis 7.07.2017 haben Studenten der HTW und der TU Dresden, aus den Fachbereichen der Fahrzeugtechnik und Fahrzeugmechatronik, am Fahrdyndamischen Praktikum auf dem DEKRA Testoval in Klettwitz teilgenommen. An unserer Station wurden Testfahrzeuge der FSD (VW Passat CC), IAV (VW
Weiterlesen →Erster ABS-Versuch erfolgreich durchgeführt
Juni 30, 2017
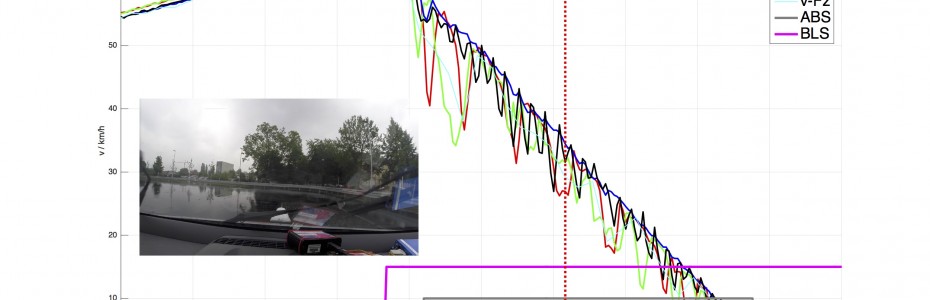
Der starke Regen am 29.06.2017 war nicht für jedermann eine Freude. Das Mechlab-Team hatte diesen dagegen mit Spannung erwartet, war so doch der Test der ABS-Fläche möglich. Die vorgesehene Bewässerung wird erst später in Betrieb gehen und dann wetterunabhängige Tests ermöglichen. Im
Weiterlesen →Bericht zum Automatisierten Fahren
Juni 30, 2017

Am 28.06.2017 erhielt das Mechlab-Team Besuch von der Dresdener Morgenpost. Der Reporter wollte Details über das neue Prüffeld für vernetzte und automatisierte Fahrfunktionen erfahren. Im Rahmen einer Demonstration zeigte das Team den aktuellen Stand sowie die geplanten Weiterentwick
Weiterlesen →Erstes Praktikum auf dem neuen Prüffeld
Juni 21, 2017

Heute fand im Rahmen der Vorlesung „Fahrzeugkommunikationssysteme“ der erste Versuch auf dem neu eröffneten Prüffeld für vernetzte und automatisierte Fahrzeuge statt. Den Studierenden des 6. Semesters „Fahrzeugtechnik“ wurden die Möglichkeiten und Grenzen von F
Weiterlesen →Ausnahmegenehmigung für Mechlab-Versuchsfahrzeug
April 27, 2017

Der im Rahmen der EFS-Nachwuchsforschergruppe „Neue Methoden der Informationsfusion (NIVES)“ betriebene Versuchsträger vom Typ BMW i3 hat für 3 Jahre eine Ausnahmegenehmigung nach § 70 StVZO erhalten. Damit ist es ab sofort möglich, hochautomatisierte Fahrfunktionen im öff
Weiterlesen →Projektmeeting zum Thema Platooning HMI mit dem Partner FSD GmbH
April 21, 2017
Die Studenten Lisa-Marie Schaefer und Till Becker der TU Dresden präsentierten dem Auditorium, bestehend aus Mitarbeitern der FSD Fahrzeugsystemdaten GmbH und dem Mechlabteam, die Ergebnisse ihrer Arbeit zum Thema Platooning HMI. Die beiden erstellten in Kooperation mit Peter Gabriel
Weiterlesen →Installation of ROS-kinetic on Ubuntu (Linux Xenial) supporting VLP16 driver
April 10, 2017

Following Instruction from http://wiki.ros.org/kinetic/Installation/Ubuntu At 1.2 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' change in /etc/apt/sources.list.d/ros-latest.list to deb http://packages.ro
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de