Mechlab @ Forst – Vermessung von Rückegassen mit einen Laserscanner
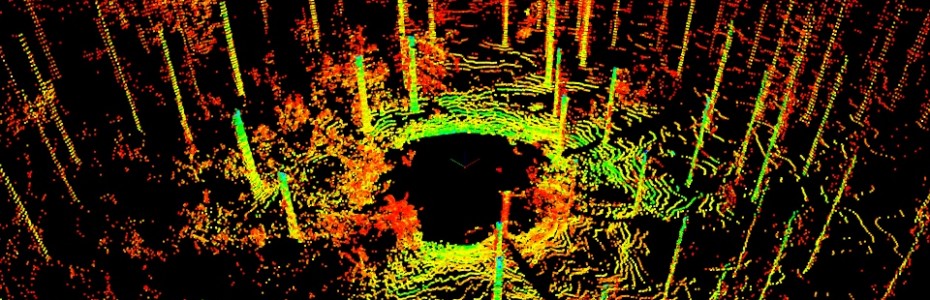
Mit dem Ziel zukünftige forsttechnische Maschinen zu automatisieren, soll der Baumbestand von Rückegassen über einen Lidar erkannt und als Referenz zur Positionierung verwendet werden.
Weiterlesen →Wissenschaftlicher Fachvortrag „Umfeldsensorik heute und in Zukunft“
Dezember 18, 2012
Im Rahmen der wissenschaftlichen Fachvorträge des 7. Semester der Fahrzeugtechnik beschäftigte sich Martin Grosche mit dem Thema „Umfeldsensorik heute und in Zukunft: Was muss ein Auto sehen?“.
Weiterlesen →Fachvortrag „Umfeldsensorik mit dem Lidar: Vor- und Nachteile ggü. Radar“
Im Rahmen der Wissenschaftlichen Fachvorträge der Studenten des 7. Semesters Fahrzeugtechnik trägt heute Herr Christian Rohde zum Thema „Umfeldsensorik mit dem Lidar: Vor- und Nachteile ggü. Radar“ vor.
Weiterlesen →Google bekommt Lizenz zur autonomen Fahrt
Gestern war ein guter Tag für die autonome Fahrzeugwelt. Google hat in Nevada, U.S.A. die Lizenz zur autonomen Fahrt mit einer Testflotte, bestehend aus 6 Toyota Prius, einem Audi TT und einem Lexus RX450h, erteilt bekommen. Somit können die Fahrzeuge Testkilometer absolvieren, welche
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de