5. IVS-Stammtisch an der HTW Dresden
Dezember 08, 2016
0 Comment

Am 05.12.2016 fand der 5. Stammtischabend der Projektinitiative „Intelligente Verkehrssysteme Sachsen (IVS)“ statt. Zu Beginn informierte Prof. Frank Köster vom DLR über die bereits seit 2009 laufenden Aktivitäten im Testfeld Niedersachsen. Danach zeigten die Mitarbeiter d
Weiterlesen →Velodyne VLP16 – 360° Umfelderfassung
November 23, 2016
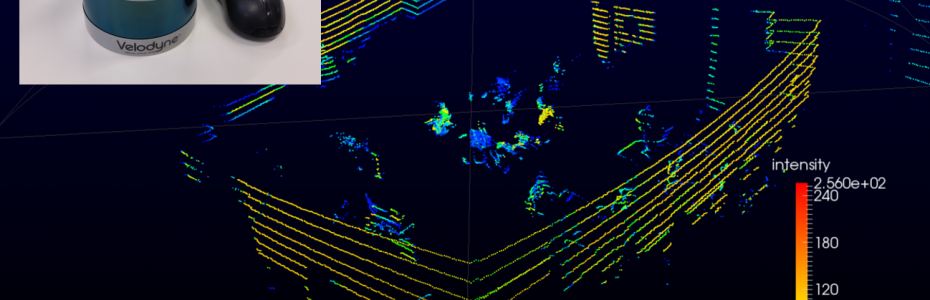
Seit dem 22.11.2016 steht für das NIVES Projekt der Velodyne VLP16 zur Verfügung. Das 360° Umfeld wird über 16 Ebenen, mit einen vertikalen Öffnungsbereich von 30° erfasst. Im nächsten Schritt erfolgt die Montage auf unseren Versuchsträger (BMW i3).
Weiterlesen →Beipass Fahrpedal – Erste Schritt zur autonomen Längsführung
September 30, 2016
Am BMW i3 Versuchsträger wird die Information des Fahrpedals über eine Gateway manipuliert. Der Fahrwunsch kann jetzt über ein HMI Interface vorgegeben werden. Im ersten Schritt soll im Rahmen der Vorlesungsreihe zur Regelungstechnik über die Sprungantwort (Vorgabe des Fahrwunschs) di
Weiterlesen →Mechlab bei der IVS Sachsen Fachtagung
September 29, 2016

Am 15.09. trafen sich die Kompetenzträger des IVS Sachsen in Dresden. Im Rahmen der Fachtagung „Intelligente Lösungen für effiziente Mobilität“ wurden aktuelle Entwicklungen und Zukunftsprojekte zum vernetzten, hoch- bzw. vollautomatisierten Fahren vorgestellt. Das Mechlab
Weiterlesen →Neues Display in Betrieb genommen
September 02, 2016

Für das Twizy-Projekt wurde jetzt der erste Stand des eigenen Displays in Betrieb genommen. Auf Basis eines Rasberry Pi erfolgt die Anzeige ausgewählter CAN-Daten mit verschiedenen Grafiken. Diese sind für Projekte zur Fahrerinteraktion beliebig anpassbar. Für die finale Ausbaustufe s
Weiterlesen →Kurzbeschreibung der Forschungsinhalte
August 08, 2016
Die Nachwuchsforschergruppe soll auf dem wissenschaftlich besonders anspruchsvollem Gebiet der sehr genauen Erkennung von Verkehrsobjekten neue Konzepte entwickeln, bewerten und prototypisch umsetzen. Mit den erzielten Ergebnissen wird es möglich sein, bisherige Schutzsysteme im Fahrz
Weiterlesen →Auswertungen zum Gesamtfahrzeugpraktikum
Juli 24, 2016

Auch in diesemJahr beteiligte sich das Labor für Kfz-Mechatronik wieder am Gesamtfahrzeugpraktikum der TU Dresden in Klettwitz. Neu dabei war die mobile Videomesstechnik, die eine zentimetergenaue Abstandsbestimmung erlaubt. In den Filmen sind vier ausgewählte Messungen zu sehen, die
Weiterlesen →Einparkassistent getestet
Juni 10, 2016
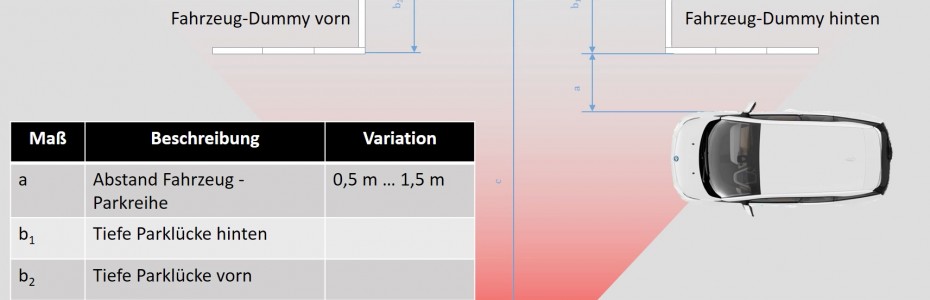
Die beiden Studenten des 4. Semesters Fahrzeugtechnik (Maximilian Schmid und Fritz Aehlig) konnten erfolgreich mit den selbst entwickelten Dummy-„Fahrzeugen“ die Leistungsfähigkeit und die Grenzen eines Einparkassistenten untersuchen. Das Testfahrzeug war ein BMW i3. Nicht
Weiterlesen →Automatisiertes Fahren an der HTW Dresden (1)
Juni 03, 2016

Im Rahmen eines Forschungsvortrages am „dies academicus 2016“ der HTW Dresden präsentierten das Mechlab-Team und die Professur Elektromobilität (Prof. S. Zipser) die Konzepte und den Umsetzungsstand von vernetzten Fahrzeugfunktionen. Das zugehörige Video zeigt die [noch ni
Weiterlesen →Erfolgreiche Demonstration der Fahrzeugvernetzung
Juni 03, 2016

Am 25.05.2016 nahm das Mechlab-Team in Kooperation mit der FSD Fahrzeugsystemdaten GmbH an einer Demonstration zur Fahrzeugvernetzung teil. Vertretern des sächsischen Arbeitsministeriums und des Bundesministeriums für Verkehr und Digitale Infrastruktur (BMVI) konnte die Leistungsfähig
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de