GEwAF Simulation Toolchain
Juni 24, 2020
0 Comment
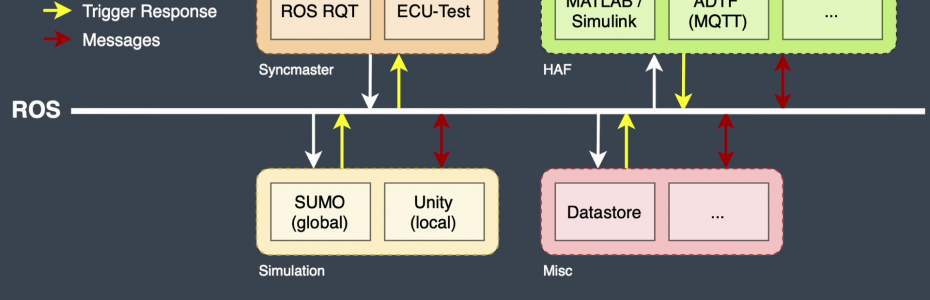
The aim of the GEwAF project for HTW Dresden was the creation of a simulation toolchain, which enables the simulation of automated driving functions. The simulation is basically divided into 3 parts, which are connected via the ROS framework: Global simulation: The traffic flow simula
Weiterlesen →Mechlab unterstützt die Produktion von Gesichtsschilden für Dresdner Kliniken
April 08, 2020
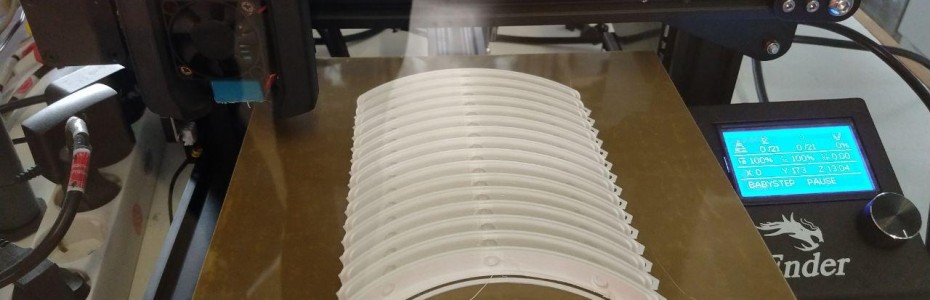
In Kooperation mit DRESDEN-concept und dem Rapid-Labor der HTW Dresden nutzen wir unsere freien 3D-Druck Kapazitäten um Teile für Gesichtsschilde herzustellen und damit bei möglichen Lieferengpässen von medizinischen Bedarfsteilen auszuhelfen. Dadurch können wir täglich bis zu 20 Baut
Weiterlesen →15 Jahre Mechlab
April 01, 2020

Am 01.04.2005 betrat ich als frisch berufener Professor die HTW Dresden. Seit dieser Zeit ist viel passiert, zahlreiche Studenten und Mitarbeiter haben im Labor mitgewirkt oder sind immer noch aktiv dabei. Vielen Dank hierfür und auf weitere gute Zusammenarbeit. Mein Dank gilt auch al
Weiterlesen →Landespolizeipräsident zu Besuch
März 07, 2020

Am 02.03.2020 besuchte Landespolizeipräsident Horst Kretzschmar die HTW Dresden. Zum Abschluss seines Besuchs informierte er sich beim Mechlab-Team auf dem Prüffeld für automatisierte Fahrfunktionen über technische Randbedingungen des automatisierten Fahrens. Dabei zeigte er sich nach
Weiterlesen →Mechlab@BMW
März 05, 2020

Das vom Mechlab-Team entwickelte Robotersystem wurde offiziell in einer BMW-Presseinformation zu neuen Prüftechnologien vorgestellt. Mit diesem System ist eine effektive und genaue Prüfung der neuen Funktion „Komfort-Zugang“ möglich. Das nachfolgende Video (Link zur Origin
Weiterlesen →Richtig bewässern mit Euro-Schwung
Februar 29, 2020

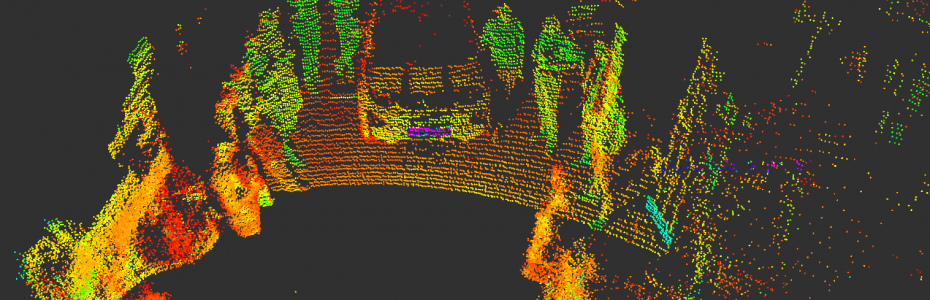
Zur systematischen Analyse der 3M-Spurmarkierungen auf dem HTW-Prüffeld erfolgten Messungen mit Laserscannern und Referenzmesstechnik. Dabei ist besonders die Messungen im nassen Zustand wichtig für die Bewertung der Sichtbarkeit. Um hierbei einheitliche Verhältnisse zu erzielen, gibt
Weiterlesen →Kooperation mit 3M Deutschland GmbH ausgebaut
Februar 25, 2020

Am 20. und 21.02.2020 besuchte Prof. Toralf Trautmann das europäische Forschungs- und Entwicklungszentrum von 3M in Neuss. Ziel des Besuches war die Ausweitung der Zusammenarbeit auf dem Gebiet der sicheren Erkennung von Fahrspurmarkierungen und Verkehrsschildern. Die Produktpalette d
Weiterlesen →Mechlab@ScieneTram
Februar 04, 2020

Am 25.02.2020 startet um 17:30 Uhr an der Haltestelle der Linie 10 (Richtung Messe Dresden) am Straßburger Platz die Sonderfahrt in der DDc Science Tram. Das diesjährige Thema lautet: Mobilität im Wandel. Prof. Toralf Trautmann wird hier die aktuelle Forschung des Mechlab-Teams zu aut
Weiterlesen →Podcast Verkehrswende
Januar 28, 2020

Im Dezember 2019 war der Bundestagsabgeordnete Stephan Kühn (Bündnis 90/Grüne) zu einem Gespräch im Labor für Kfz-Mechatronik. Dabei ging es um den Beitrag der Fahrzeugautomatisierung zur Verkehrswende. Das vollständige Interview ist hier zu finden: Podcast Verkehrswende
Weiterlesen →Mechlab-Neujahrsgruß
Januar 08, 2020
Das gesamte Mechlab-Team (siehe Bild, Dank an Hendrik für die Aufbereitung) wünscht allen Projektpartner ein gesundes neues Jahr und die erfolgreiche Fortsetzung der laufenden sowie tolle Ideen für neue Projekte.
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de