Pointcloud Visualization at ZalaZONE

Introduction We visited ZalaZONE late November this year. It is located in Zalaegerszeg, Hungary, one hour east of the Austrian-Hungarian border. With about 260 ha of space the ZalaZONE test ground provides test oppertunities and facilities for the testing of a wide range of future mo
Weiterlesen →Neuer Artikel über das Mechlab-Team
Dezember 14, 2019

In der aktuellen Ausgabe des HTW-Magazins „WissenD“ findet sich ein Artikel über das Mechlab-Team. Dabei geht es neben der Vorstellung der Forschungsaktivitäten auch um die neuen Anforderungen im Berufsbild des Fahrzeugtechnik-Ingenieurs. Bedingt durch die Digitalisierung
Weiterlesen →ASAM International Conference 2019
Dezember 12, 2019
Unter dem Motto Autonomous Driving – Standardized Virtual Development as a Key to Future Mobility tagte vom 10-11.12 die 4. ASAM International Conference 2019 im Dresdner Congress Center. Wesentliche Schwerpunkte waren insbesondere die Standardisierung der virtuellen Entwicklung, Veri
Weiterlesen →VDI-Zertifikatskurs unter Mechlab-Leitung
Dezember 06, 2019

Im kommenden Jahr startet das VDI-Wissensforum mit dem neuen Zertifikatslehrgang „Fachingenieur Fahrzeugautomatisierung VDI“ unter der Gesamtleitung von Prof. Toralf Trautmann. Zwei der 4 Pflichtmodule finden direkt an der HTW Dresden statt. Damit können die vorhandenen se
Weiterlesen →ROS-Simulink-Anbindung
November 24, 2019
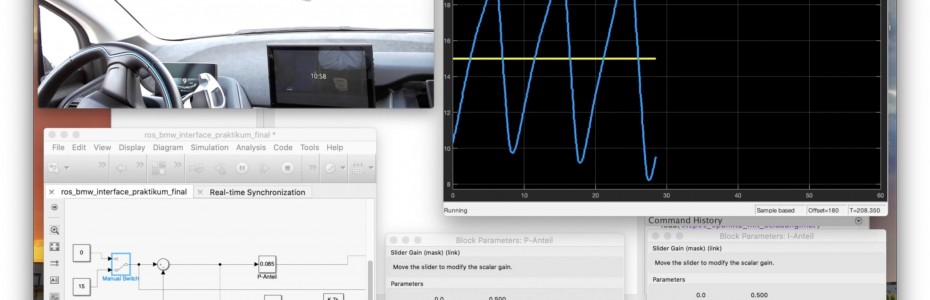
Dank der systematischen Weiterentwicklung des Mechlab-Versuchsträgers durch das gesamte Mechlab-Team ist es nun möglich, das Fahrzeug auch aus Simulink heraus anzusteuern. Die Anbindung erfolgt durch den Betrieb des Steuerungsrechners als ROS-Knoten über die Ethernet-Schnittstelle. Zu
Weiterlesen →Automatisierte Fahrt verbessert
Oktober 28, 2019

Durch die Einbeziehung eines Korrektursignals (Differential GPS) konnte die Ortung für die Fahrzeugführung des Mechlab-Versuchsträgers deutlich verbessert werden. Damit ist ab sofort eine stabile Fahrt mit Abweichungen im Bereich von nur noch 10 cm möglich. Das Video zeigt eine Testfa
Weiterlesen →Mechlab-Vortrag auf Automotive-Tagung
Oktober 25, 2019

Prof. Toralf Trautmann stellte auf der Tagung „Innovative Transformation of the Automotive Industry“ auf Einladung des ungarischen Verkehrsministeriums den aktuellen Stand und die Herausforderungen im Bereich des automatisierten Fahrens vor. Neben verschiedenen Podiumsdisk
Weiterlesen →ROS + ADTF = ?

Sowohl ROS((https://www.ros.org/)) als auch ADTF((https://www.b-plus.com/en/engineering/technologie/adtf.html)) sind abgeschlossene, eigenständige Entwicklungsumgebungen / -frameworks, die nicht für den kombinierten Gebrauch gedacht sind. Und warum auch? Jeweils für sich erfüllen sie
Weiterlesen →Digitales Verkehrsschild im Testbetrieb
August 14, 2019

Auf dem Testfeld der HTW Dresden wurde für einen Zeitraum von einem Monat ein digitales Verkehrsschild durch die Firma Green Way Systems in Betrieb genommen. Für den Zeitraum von ca. einem Monat können darüber benutzerspezifische und standardisierte Verkehrssymbole eingeblendet werden
Weiterlesen →GEwAF’s Docker Integration

Zu Docker Docker® ist eine Open-Source-Software, mit der Anwendung und deren zugehörige Abhängigkeiten in ein „Image“ verpackt (gebaut) werden können. Diese Images können dann vom eigentlichen (Betriebs-) System getrennt ausgeführt und validiert werden. Begriffsklärung Bev
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de