LCX-Kabel auf der Prüffläche

Heute wurde ein LCX-Kabel auf der Prüffläche verlegt. Damit besteht jetzt die Möglichkeit verschiedene Signale in das Kabel einzuspeisen. Das LCX-Kabel ist auch unter dem Namen Leckwellenleiter bekannt. Typisches Anwendungsgebiet ist die Einspeisung des Radiosignals in Tunnelanlagen o
Weiterlesen →Saxony5-Hackathon – Tag 5
August 11, 2019

Tag 5 – das bedeutet Abschluss. Nach durchwachter Nacht konnten die Teilnehmer zwei Umsetzungen der Aufgabenstellung und mehrere ausbaufähige Alternativansätze präsentieren. Nach den theoretischen Vorbetrachtungen ging es dann aufs Prüffeld zur großen Abschlussdemonstration. Dab
Weiterlesen →Saxony5-Hackathon – Tag 4
August 08, 2019

Wie jeden Tag der morgendliche Blick in den Rechnerpool. Fast könnte man meinen, die Gruppe hätte den Raum seit dem gestrigen Abend nicht verlassen. Doch wie der weitere Weg in den Flur zeigt, fand am Vorabend zu später Stunde noch eine Teambesprechung außerhalb des Rechnerpools statt
Weiterlesen →Saxony5-Hackathon – Tag 3
August 07, 2019

Der dritte Tag begann so, wie der zweite (an der HTW) endete – am Rechner. Erste Messungen wurden auch durchgeführt, das Ziel scheint also näher zu rücken. Am Nachmittag demonstrierte die FSD Fahrzeugsystemdaten GmbH aus Dresden dann ihren Versuchsträger für automatisierte Fahrf
Weiterlesen →Saxony5-Hackathon – Tag 2
August 06, 2019

Der zweite Tag stand ganz im Zeichen der Funktionsentwicklung. Als erste Aufgabe wurde die Implementierung einer auf Lidardaten basierenden Spurführung ausgewählt, die Vorarbeiten dazu erfolgten bereits durch Christopher Dunkel (Blogbeitrag). Um die Dynamik zu erhöhen, treten zwei Tea
Weiterlesen →Saxony5-Hackathon – Tag 1
August 05, 2019

Am 05.08.2019 startete der 1. Hackathon zum Thema „Automatisierte Fahrfunktionen“. Insgesamt 11 Studierende der HTWK Leipzig und der HTW Dresden wollen neue Funktionen für ein Versuchsfahrzeug entwickeln. Der erste Tag stand im Zeichen der Vorstellung des Mechlab-Teams und
Weiterlesen →Applying Filters on LiDAR Point Clouds
Juli 24, 2019
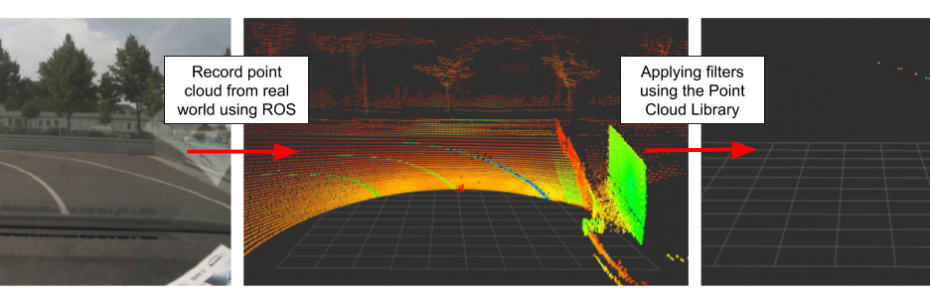
The Point Cloud Library (PCL) offers great possibilities for processing large point clouds. In the following article the principle of different filters and its application on pointclouds from Velodyne Puck and Ouster OS1 LiDARs using ROS shall be described. For quick configuration cha
Weiterlesen →Implementierung und Test der Robotics System Toolbox
Juli 15, 2019
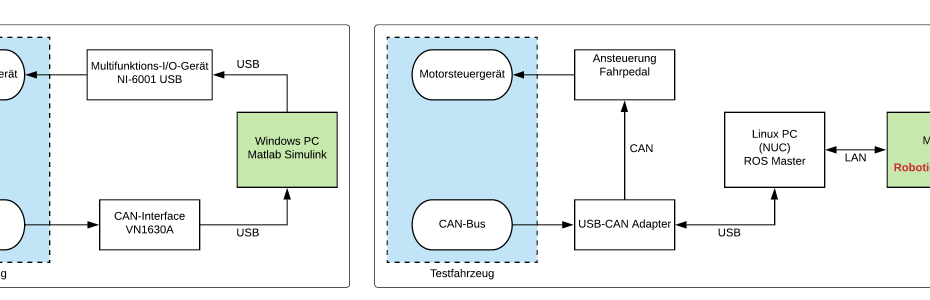
Für die Weiterentwicklung automatisierter Fahrfunktionen erfolgte die Implementierung der Robotics System Toolbox von MathWorks. Diese Toolbox ermöglicht den Datenaustausch zwischen MATLAB und Simulink und dem Robot Operating System (ROS).
Weiterlesen →Patentanmeldung für Scheinwerfer-Prüfverfahren
Juli 13, 2019
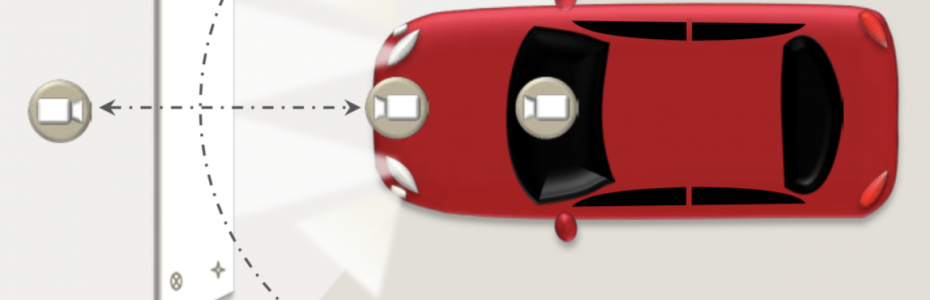
Aufbauend auf Vorarbeiten zu neuen Methoden der Scheinwerferprüfung (siehe z.B. Diplomarbeit André Najort) wurden neue Konzepte für praxisnahe Verfahren entwickelt. Das nachfolgende Expose zeigt eine Kurzfassung der Methodik sowie den Verweis auf die Patentanmeldung. Bei Interesse kon
Weiterlesen →Mechlab @ Cooper University NYC
Juli 02, 2019

Im Rahmen von NIVES bestand die Möglichkeit, unsere Aktivitäten mit der Cooper University in New York zu diskutieren und zukünftige gemeinsame Projekte zu besprechen. Als Ziel wurde die Entwicklung eines Mobilitätskonzeptes vereinbart, welches über den gemeinsamen Austausch von Studen
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de