| Student | Christopher Dunkel |
|---|---|
| Thema | Adaption eines Versuchsträgers und Entwicklung von Funktionsprototypen für automatisierte Fahrfunktionen |
| Bearbeitungszeitraum | 15.09.2016 – 15.02.2017 |
| Betreuer |
Prof. Dr. rer. nat. Toralf Trautmann M.Sc. Sven Eckelmann |
Diplomarbeit zum Download
Aufgabenstellung
- Einarbeitung in die Programmierung mit MATLAB/Simulink
- Inbetriebnahme einer dSPACE MicroAutoBox
- Konzeption und Inbetriebnahme der Aktorik für die Automatisierung von Fahrfunktionen
- Regelungstechnische Charakterisierung des Gesamtfahrzeuges
- Konzeption und Test eines autonomen Fahrmanövers
Einleitung
Die Diplomarbeit ist Teil eines studentischen Projektes zum autonomen Fahren und setzt sich im Wesentlichen mit den elektro- und informationstechnischen Aspekten auseinander. Weitere Schwerpunkte sind u. a. der mechanische Umbau des Versuchsträgers sowie die Interaktion zwischen Mensch und Maschine (MMI). Ferner sind die Kernziele innerhalb des Projektes die Realisierung einer Platooning-Funktion sowie die Umsetzung automatisierter Parkfunktionen. Ersteres beschreibt im Allgemeinen das Kolonnenfahren von Nutz- fahrzeugen auf Autobahnen mit dem Ziel der Verringerung des Kraftstoffverbrauchs sowie der optimierten Fahrbahnauslastung. Da bisher keine Machbarkeitsnachweise in Bezug auf den urbanen und ländlichen Individualverkehr existieren, könnte durch das Projekt somit Grundlagenforschung betrieben werden. Die automatisierten Parkfunktionen, wie z. B. das Erkennen passender Lücken durch entsprechende Umfeldsensorik in Verbindung mit einem automatischen Parkvorgang, sind bereits heute als Sonderausstattung für viele Fahrzeuge erhältlich. Denkbar ist die Implementierung im Projekt durch vernetzte Mobilität so zu erweitern, dass das Fahrzeug nicht nur den Parkvorgang ausführt, sondern bei Befahren einer entsprechenden Fläche durch Übernahme der Längs- und Querdynamik selbstständig eine optimale Stellfläche ermittelt. Die Diplomarbeit stellt somit eine Grundlage für aktuelle und zukünftige Projekte dar. Zudem ist ein perspektivischer Einsatz in Lehre und Forschung anzustreben.
Analyse des Versuchsträgers
Bei dem Versuchsträger handelt es sich um einen, von der Fahrzeugsystemdaten GmbH zur Verfügung gestellten, elektrisch angetriebenen Renault Twizy. Das vierrädrige Fahrzeug mit Heckantrieb und einer Höchstgeschwindigkeit von 80 km/h ist als Quad zugelassen und wird seit 2011 unverändert produziert. Die Sitzplätze für Fahrer und Beifahrer sind hintereinander in einer hochsteifen Fahrgastzelle angeordnet. Zu den weiteren Sicherheitsmerkmalen zählt ein Fahrerairbag, ein 4-Punkt-Sicherheitsgurt vorn und ein 3-Punkt-Sicherheitsgurt hinten.

Renault Twizy (vgl. Autohaus Ullein)
Modellentwicklung und regelungstechnische Charakterisierung
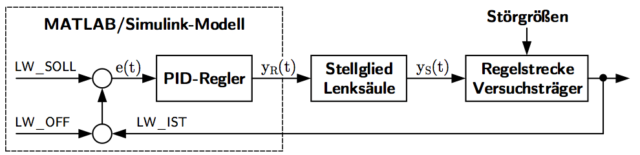
Querführung
Die Aufgabe dieses Funktionsblockes besteht darin, den linken Teil des dargestellten Regelkreises so umzusetzen, dass mithilfe eines vorgegebenen Lenkwinkels und der rückführenden Größe durch den Lenkwinkelsensor die Stellgröße yR(t) für den Links- und Rechtslauf des Motors der Lenksäule erzeugt werden kann.
Zur Charakterisierung der Regelstrecke soll zunächst durch Anlegen einer Sprungfunktion die Sprungantwort des Systems aufgenommen werden. Der Regelkreis wird für diesen Zweck unterbrochen und ohne Regler betrieben. Das Stellglied wird direkt mit einem PWM-Signal angesteuert und über den Lenkwinkelsensor der sich ergebende Lenkwinkel registriert. Da es sich um ein I-System handelt, konvergiert die Ausgangsgröße nicht gegen einen festen Endwert, sondern nimmt stetig zu. Um das Stellglied nicht zu zerstören, ist es daher wichtig, die Stellgröße zu begrenzen. Die rückführende Größe durch den Lenkwinkelsensor wird aus diesem Grund dazu verwendet, die Anregung ab einem definierten Punkt zu unterbrechen.
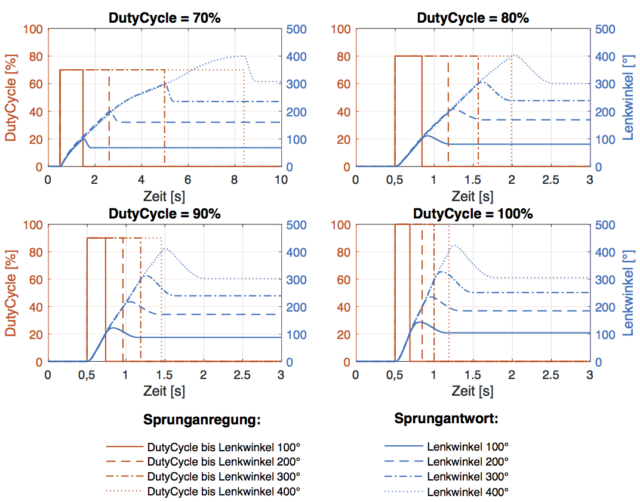
Bei der Anregung mit einem DC von 70 % ist in allen Messungen eine sehr langsame Annäherung an die Lenkwinkel zu erkennen. Die Endwerte werden erreicht. Jedoch ergibt sich, bedingt durch die steigenden Widerstände in Abhängigkeit des Radeinschlages, insbesondere bei der Ansteuerung des −400°−Einschlages, ein verzögernder Verlauf. Anregungen in diesem Bereich sind daher zu gering, um definierte Lenkwinkel ansteuern zu können. Sie werden jedoch als Stellgröße durch den Regler erzeugt, wenn es wichtig ist, bestimmte Winkel zu halten oder Korrekturen auszuführen. Erst ab einem DC zwischen 80 % und 90% ist ein annähernd linearer Verlauf der Sprungantworten zu erkennen.
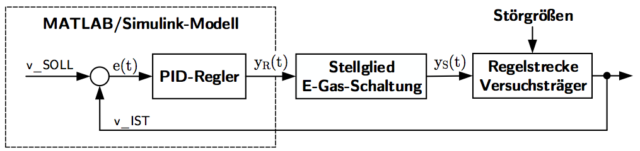
Längsführung
Innerhalb dieses Subsystems werden alle notwendigen Funktionsblöcke bereitgestellt, welche eine Übernahme der Längsführung, in diesem Fall durch das elektronische Gaspedal, ermöglichen. Im Gegensatz zum Regelkreis der Querführung, ergibt sich bei der einfachen Simulation des E-Gas zunächst kein geschlossener Regelkreis. Erst die Erweiterung durch eine rückführende Größe, wie z. B. der Geschwindigkeit, ermöglicht eine geregelte Simulation des elektronischen Gaspedals, wodurch weitere Funktionen, wie bspw. Beschleunigungs- oder Verzögerungsversuche mit einer definierten Beschleunigung bzw. Konstantfahrten mit einer definierten Geschwindigkeit, realisiert werden können.
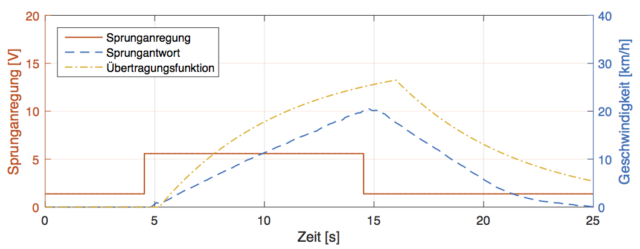
Analog zur Querführung soll die Regelstrecke zunächst durch das Anlegen einer Sprungfunktion charakterisiert werden. Dazu wird der Regelkreis wieder unterbrochen und ohne Regler betrieben. Mithilfe der ermittelten Pedalkennlinien wird anschließend ein Spannungssprung des Pedals simuliert und die Sprungantwort des Versuchsträgers aufgenommen.
Automatisierte Fahrfunktionen
Geschwindigkeitsregelanlage
Eine Geschwindigkeitsregelanlage (Tempomat) beschreibt ein elektronisches Regelsystem, durch dessen Einsatz eine vom Fahrer gesetzte Geschwindigkeit unter dem Einfluss von Fahrwiderständen gehalten werden kann. Es wird in Fahrzeugen vorzugsweise als Assistenzsystem eingesetzt und soll den Fahrer auf monotonen Streckenabschnitten entlasten und somit einen entspannten Fahrbetrieb ermöglichen. Aus technischer Sicht setzt sich das System im Wesentlichen aus dem E-Gas, dem Geschwindigkeitsregler sowie einer Bedieneinheit, welche i.d.R. im Lenkstockhebel integriert ist, zusammen. Die Steuerung des Tempomats wird durch MATLAB/Simulink mithilfe eine Zustandsautomaten umgesetzt.
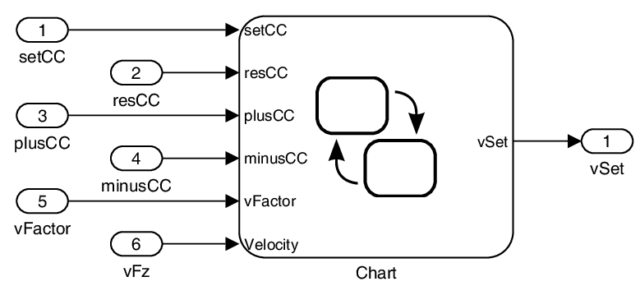
Die wichtigsten Parameter sind sind:
- setCC – Geschwindigkeit setzen
- resCC – Geschwindigkeit zurücksetzen
- plusCC – Geschwindigkeit um den Faktor „vFactor“ erhöhen (z. B. 1 km/h)
- minusCC – Geschwindigkeit um den Faktor „vFactor“ verringern (z. B. 1 km/h)
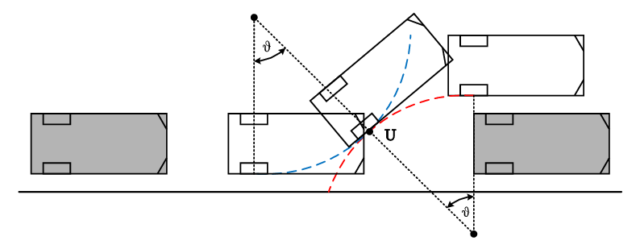
Automatisiertes Einparken
Die folgenden Abbildung beschreibt den Prozess eines längs ausgerichteten Parkmanövers in 3 Schritten. Zu Beginn wird das zu parkende Fahrzeug parallel neben dem geparkten Fahrzeug abgestellt. Die Verlängerung der Hinterachse sollte sich deckungsgleich zur hinteren Stoßstange befinden. Im Anschluss erfolgt ein Rechtseinschlag der Lenkung und ein Zurücksetzen des Fahrzeuges bis nach einem Winkel ϑ der Umkehrpunkt U erreicht ist. An dieser Stelle wird das Lenkrad zunächst in die Nulllage gebracht und anschließend um den gleichen Winkel nach Links eingeschlagen. Der Parkvorgang ist beendet, wenn sich das Fahrzeug durch ein weiteres Zurücksetzen zwischen dem vorderen und dem hinteren Fahrzeug eingereiht hat.