| Student | Henrik Neumann |
|---|---|
| Thema | Entwicklung einer Situationserkennung für hochautomatisierte Fahrfunktionen im urbanen Bereich |
| Bearbeitungszeitraum | 20.04.2017 – 20.10.2017 |
| Betreuer |
Prof. Dr. rer. nat. Toralf Trautmann M. Sc. Sven Eckelmann |
Aufgabenstellung
- Einarbeitung in die Grundlagen von Objekterkennung und Situationsinterpretation
- Ermittlung von unterschiedlichen Konzepten anhand festgelegter Referenzstrecken
- Prototypische Umsetzung eines Algorithmus und Ermittlung geeigneter Applikationsparameter
- Evaluation der implementierten Situationserkennung im Fahrversuch
Einleitung
Ziel dieser Arbeit ist es, mit verschiedenen Sensordaten einen Algorithmus zu erstellen, um die Situation im Umfeld des eigenen Fahrzeuges auszuwerten und potentielle Gefahrenstellen zu erkennen. Dabei soll mit den eigenen Fahrzeugdaten aus dem Fahrzeug-CAN und der Objekterkennung vom Laserscanner eine Situationen aus dem Umfeld erkannt und klassifiziert werden. Mit den vom Algorithmus errechneten Daten und dem Framework „ROS“ soll eine Objektliste mit allen Informationen, dem Gesamtsystem zur Verfügung gestellt werden.
Theoretische Entwicklung
Aufbau des Algorithmus
Objektranking
Das Objektranking dient zur Ermittlung, auf welcher Position sich ein Objekt auf der Trajektorienfläche des eigenen Fahrzeuges befindet. Dafür wird die Trajektorienfläche in Segmenten aufgeteilt und auf Schnittpunkte, mit dem Objekt untersucht. Durch die Segmentierung entsteht eine eindeutige Indexierung. Mit dieser kann ein Ranking erfolgen, welches das zu verfolgende Objekt ist. Durch den Index und der Bitfolge, kann das Objekt im groben reproduziert werden.
Gefahrenerkennung
Mit der Gefahrenerkennung ist es möglich, eine zukünftige Position des Objektes vorherzusagen und es als Gefahr zu erkennen. Dabei muss beachtet werden, dass die Vorhersage eine Annahme ist, die bei einer gleichbleibenden Bewegung des Objektes getroffen wird. Bei einer erkannten Gefahr wird ein Zeitfenster ermittelt, wann die Kollision eintreffen wird.
Einschererkennung
Praktische Umsetzung
Laserscanner
Für die Umfelderfassung wird der …
[Velodyne]
CANUSB
Die CAN-Schnittstelle wird dargestellt von einem CAN-USB-Adapter der Firma Lawicel. Dieser realisiert die Verbindung zwischen Messrechner und CAN-Bus des Versuchsträgers für die Abfrage der Fahrzeug-Egodaten.Messrechner
Der Intel NUC (Next Unit of Computing; 6) ist aufgrund seiner kompakten Größe und der Möglichkeit des Betriebs an einer 12-V-Spannungsquelle für den Einsatz im Fahrzeug geeignet. Er stellt durch das Ausführen des ROS-Cores die Kommunikationsgrundlage im lokalen Netzwerk bereit und führt die Datenverarbeitung durch ROS-Nodes aus.
[Intel]
Der NUC und der Netzwerkswitch (hier nicht dargestellt) bilden den Kern der Kommunikationsplattform als Grundlage für die ROS-Umgebung.
Auswertung des Algorithmus
Fahrbahnerkennung
Die Fahrbahnerkennung wurde auf Grundlage zwei unterschiedlicher Herangehensweisen ausgeführt.
Es erfolgt die Umsetzung einer Fahrbahndetektion zum einen über die Festlegung eines Erfassungsbereiches in einer zu erwartenden Entfernung der Fahrbahnebene zum Velodyne, und zum anderen aus der Filterung von Intensitäten. Der Velodyne, in seiner Eigenschaft als abbildender Laserscanner, gibt zu jedem reflektierten Punkt auch einen Intensitätswert der Relfexion zurück. So lässt sich die Filterung der Fahrbahn durch Nutzung der Intensitätswerte realisieren, da von der Fahrbahnoberfläche nachweislich (im Versuch für trockene Fahrbahnoberflächen nachgewiesen) sehr niedrige Intensitätswerte zurückgegeben werden.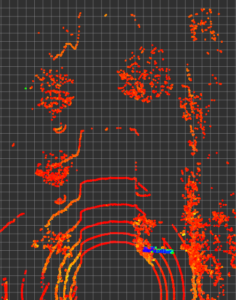
ungefilterte Punktwolke
Die hier gezeigten Darstellung sollen die Filterung der Fahrbahn durch die Herangehensweise mit Festlegung eines Erfassungsbereiches verdeutlichen. Die Abbildung links zeigt die ungefilterte Punktwolke mit Blick auf die XY-Ebene des Velodyne. Der Velodyne befindet sich dabei im Zentrum der ringförmigen Ebenen am unteren Bildrand. In der rechten Abbildung ist die gleiche Punktwolke mit angewandeter Filterung dargestellt. Die Fahrbahn ist in diesem Fall aus der Punktwolke herausgerechnet.
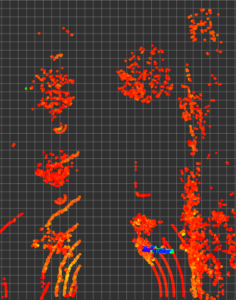
Punktwolke mit Filterung der Fahrbahn durch Anwendung des Erfassungsbereiches
Die Erkennung dynamischer Objekte wurde ebenfalls durch einen Ansatz der Nutzung von Intensitätswerten sowie durch Berechnung einer Differenz-Punktwolke realisiert.
Intensitätsbasierte Objekterkennung
Intensitätsbasierte Objekterkennung mit Distanzangabe
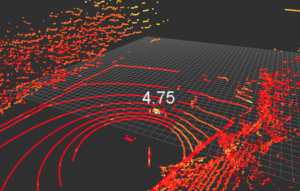
Ziel ist die Detektion des vorausfahrenden Fahrzeugs bei gleichzeitiger Distanzbestimmung. Es werden dabei ebenfalls die Intensitätsinformationen der Punktdaten ausgewertet. Die Detektion erfolgt in diesem Fall durch Auswertung besonders hoher Intensitäten, die nur von retrore flektiven Flächen zurückgegeben werden. Retroreflektive Flächen sollen das einfallende Licht direkt in Richtung der Lichtquelle zurückfallen lassen. U.a. sind Oberflächen von Verkehrszeichen und Kfz-Kennzeichen retroreflektiv ausgeführt. Intensitätswerte retroreflektiver Oberflächen setzten sich stark von den übrigen (verhältnismäßig niedrigen) Intensitäten der Punktwolke ab und können so für die Umsetzung dieser Objekterkennug genutzt werden. Weiter erfolgt die Festlegung eines Erfassungsbereichs entlang der Fahrzeugquerachse, damit Störeinflüsse bspw. von Kennzeichen parkender Fahrzeuge oder von Verkehrsschildern minimiert werden können.
Objekterkennung durch Bildung einer Differenz-Punktwolke
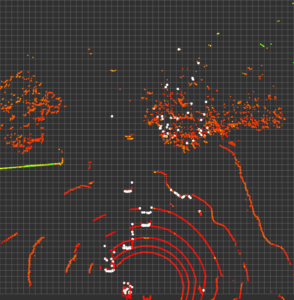
Überlagerung der gesamten Punktwolke und der Differenz-Punktwolke (weiß)
Ziel ist die Bestimmung bewegter Objekte innerhalb eines Erfassungsbereichs. Es werden dabei zwei aufeinander folgende Punktwolken unter Berücksichtigung der Fahrzeugbewegung miteinander verglichen und eine Differenz gebildet, die der Punktwolke bewegter Objekte entspricht.
Die Darstellung der überlagerten Punktwolken (links) zeigt die gesamte Punktwolke und die Differenz-Punktwolke (weiß) mit Blick auf die XY-Eben des Velodyne. Im Verlgeich mit dem Kamerabild (Abbildung rechts) zeigt sich, dass die bewegten Objekte grundsätzlich korrekt wiedergegeben werden. Das blaue Fahrzeug (Bildmitte, Abb. rechts) wird jedoch durch Schattenbildung verdeckt. Der weiße Bus (linker Bildrand, Abb. rechts) liegt außerhalb des Erfassungsbereichs. Auch das im Kamerabild nicht erkenntliche Fahrzeug (Schatten links neben dem Versuchsträger) wird durch die Differenz-Punktwolke abgebildet.

Kreuzungssituation im fließenden Verkehr
