| Thema | Realitätsnahe Simulation von Stoßdämpferanregungen zur Entwicklung von Prüfverfahren |
|---|---|
| Bearbeitungszeitraum | 06.06.2014 – 06.11.2014 |
| Betreuer |
Prof. Dr. rer. nat. Toralf Trautmann |
Aufgabenstellung
- Erstellen einer Benutzeroberfläche zur Simulation von Schwellenüberfahrten
- Erweitertes Radmodell zur Beschreibung der Stoßdämpferanregung während der Überfahrt
- Verifizierung der Simulation durch Messergebnisse
- Simulation verschiedener Überfahrten mit Parametervariation zur Ableitung neuer Prüfvorschriften
Fahrzeugsimulation
Durch die Verwendung von Simulationssoftware, kann das Verhalten eines Fahrzeuges am Computer nachgestellt werden. Zu diesem Zweck werden relevante Fahrzeugkomponenten durch physikalische Zusammenhänge modelliert. Durch die Vorgabe von Simulationsparametern kann die Reaktion des Fahrzeugmodells auf diese äußeren Einflüsse erkannt und Rückschlüsse auf die Reaktion eines realen Fahrzeuges gezogen werden.
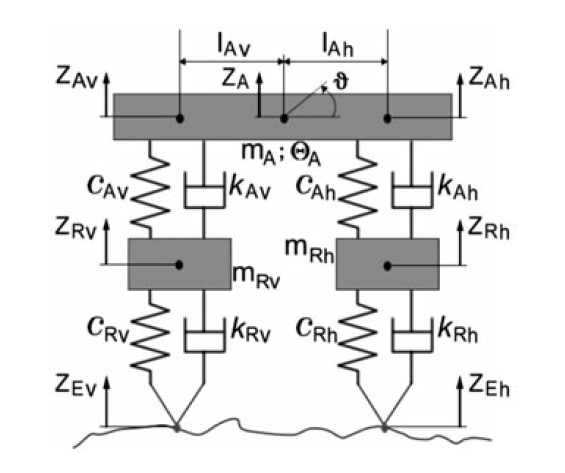
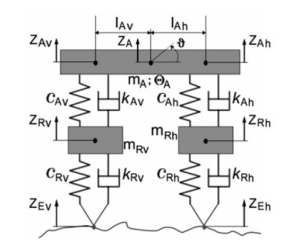
Ausgangspunkt der Arbeit stellt ein erweitertes Einspur-Federungsmodell dar. In diesem Kapitel wird dieses Federmodell mit allen bereits stattgefundenen Erweiterungen erläutert.
Das Einspur-Federungsmodell besteht aus einem biegesteifen Balken, welcher den Aufbau simuliert. Sowie je einer Feder-Dämpfereinheit pro Achse zur Simulation der Aufbaufederung. Die Rad- bzw. Achsmassen werden in diesem Modell nochmals durch je eine Feder- Dämpfereinheit zur Simulation der Reifendämpfung abgefedert.
Durch die Modellierung des Rades als Feder ist ein abheben des Rades von der Fahrbahn nicht möglich. Dieser Zustand wird durch eine Erweiterung erreicht. Wenn die Bedingung erfüllt ist, dass die Auslenkung des Rades größer ist als die Fahrbahnhöhe, wird die Federkonstante des Reifens Null gesetzt. Dadurch ist ein Abheben des Reifens von der Fahrbahn möglich. Dieser Zustand macht es jedoch notwendig, die Schwerkraft in die Simulation mit einzubeziehen. Somit ist gewährleistet, dass das Rad nach dem Abheben von der Fahrbahn durch die Gewichtskraft wieder auf diese zurückgeführt wird.
Weiterhin wurde das Modell bereits auf ein Zweispurmodell erweitert. Dazu wurden die Achsen jeweils durch zwei Räder mit separater Feder- Dämpfereinheit ersetzt. Dadurch wird es ermöglicht, unterschiedliche Verschleißzustände der Stoßdämpfer einer Achse zu simulieren.
Die Anregung auf das Federmodell ergibt sich für jeden Berechnungsschritt aus der Höhe des Straßenprofils unter dem Radmittelpunkt.
Als Eingangsgrößen im Vektor u sind jene Größen definiert, welche das Schwingungssystem außerhalb der Systemgrenzen anregen. Siehe Tabelle 2.1. Dazu zählen die Höhe des Fahrbahnprofils unter dem jeweiligen Reifen zum Zeitpunkt des Berechnungsschrittes sowie die konstante Erdbeschleunigung.
Tabelle Eingangsvektor
Fahrbahnhöhe VL [m] Fahrbahnhöhe VR [m] Fahrbahnhöhe HL [m] Fahrbahnhöhe HR [m] Erdbeschleunigung 9,81 [m/s²] Die Abkürzungen VL, VR, HL und HR stehen hier, sowie im weiteren Verlauf der Diplomarbeit, für die Position des Rades.
VL – vorne links, VR – vorne rechts, HL – hinten links, HR – hinten rechts Die Zustandsgrößen im Vektor x beschreiben die Position sowie die Bewegung der einzelnen Masseelemente des Modells.Tabelle Zustandsvektor
1 Auslenkung Rad VL [m] 2 Geschwindigkeit Rad VL [m/s] 3 Auslenkung Rad VR [m] 4 Geschwindigkeit Rad VR [m/s] 5 Auslenkung Rad HL [m] 6 Geschwindigkeit Rad HL [m/s] 7 Auslenkung Rad HR [m] 8 Geschwindigkeit Rad HR [m/s] 9 Auslenkung Aufbau [m] 10 Geschwindigkeit Aufbau [m/s] 11 Nickwinkel [rad] 12 Nickrate [rad/s] 13 Wankwinkel [rad] 14 Wankrate [rad/s] Die Übergangsgrößen im Vektor xs sind die Ableitungen der Zustandsgrößen. Dies sind Geschwindigkeiten und Beschleunigungen.
Die Berechnung der Zustandsgrößen Erfolgt mithilfe zweier Matrizen. Die Systemmatrix A und die Steuermatrix B. Bei der Berechnung des Zustandsübergangs wird zunächst der Übergangsvektor berechnet.
xs = A*xmem + B*u
Dabei wird die Systemmatrix mit dem Zustandsvektor des vorangegangen Berechnungsschrittes xmem multipliziert, wodurch die Übergangsparameter aufgrund der bereits im System vorhandenen Bewegungen berechnet werden. Dazu wird das Produkt aus Steuermatrix und Eingangsvektor addiert. Dieses Produkt beinhaltet die Übergangsparameter aufgrund der äußeren Einflüsse Fahrbahnhöhe und Erdbeschleunigung. Im nächsten Schritt wird der Zustandsvektor berechnet.
x = xmem + xs *dt
Dieser setzt sich aus dem Integral des Übergangsvektors mit dem Zustandsvektor als Integrationskonstante zusammen.
Nach erfolgreicher Simulation kann demnach auf die Parameter des Zustands- und Übergangsvektors jedes Berechnungsschrittes zugegriffen werden.
Benutzeroberfläche
Um die Benutzeroberfläche möglichst Übersichtlich zu gestalten, erfolgte eine Unterteilung in zwei Bereiche.
Am linken Bildschirmrand sind die Bedienelemente zu finden. Durch Register erfolgt der Zugriff auf Eingabeparameter und Auswertungs-/Ausgabeparameter. Um diesen Bereich möglichst kompakt zu halten, wurden für die Beschriftung der Register Abkürzungen verwendet. „Sw“ steht für Schwellenparameter, „Fz“ für Fahrzeugparameter, „=“ steht für Auswertungs-/Ausgabeparameter und unter „Para“ können vordefinierte Fahrzeugparameter geändert werden.
Um Auswertungen und Analysen zu erleichtern, muss der Bereich für die Anzeigeelemente möglichst groß sein. Der Zugriff auf die verschiedenen Simulationswerte erfolgt ebenfalls über Register.Eingabeparameter
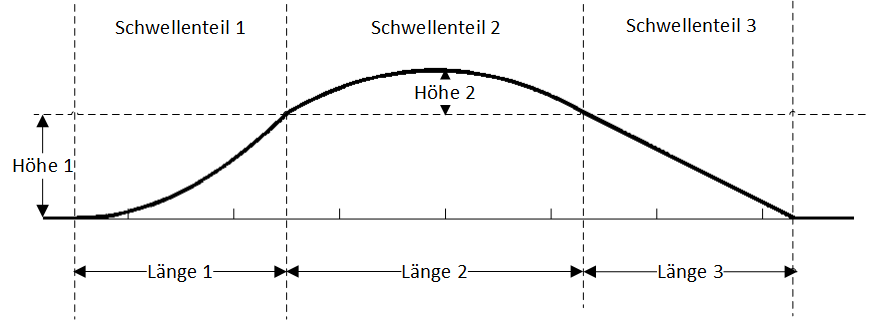
Um Simulationen mit verschiedenen Schwellenformen zu ermöglichen, kann das Design des Schwellenquerschnitts in der Benutzeroberfläche bearbeitet werden. Dazu ist die Schwelle in drei Teilbereiche untergliedert. Diese sind in Länge, Höhe und Form variabel. Die Form jedes Schwellenteils kann konvex, konkav oder linear sein.
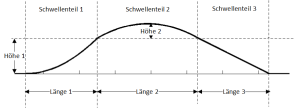
In der Abbildung wurde im ersten Schwellenteil eine konkave, im zweiten Schwellenteil ein konvexer und im dritten Schwellenteil ein linearer Verlauf gewählt. Auf die Höhe des dritten Schwellenteils als Parameter wurde verzichtet. Diese ergibt sich aus der Höhe des ersten Schwellenteils.
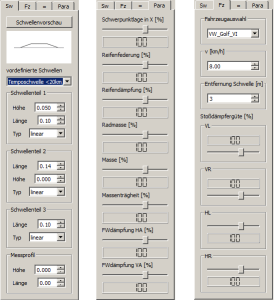
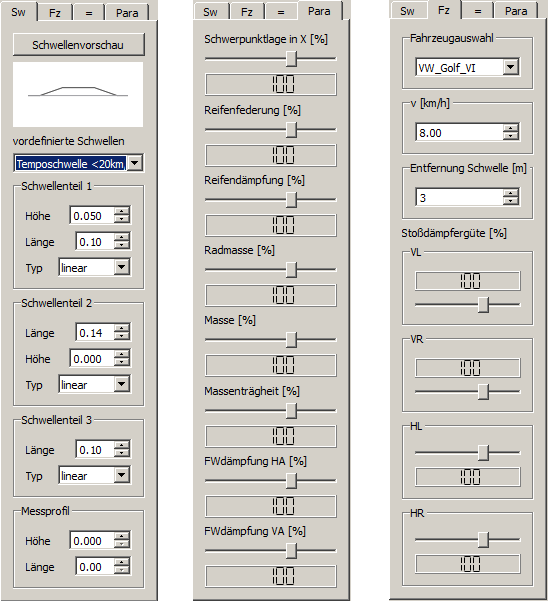
In der obenstehenden Abbildung sind die Menüs zur Bearbeitung der Eingabeparameter dargestellt. Im Register „Sw“ erfolgt die Bearbeitung der Schwellenform. Darin ist es möglich, vordefinierte Schwellen auszuwählen, diese abzuändern oder einen neuen Schwellenquerschnitt zu definieren und sich im Vorschaufenster anzeigen zu lassen. Des Weiteren können in der Untergruppe Messprofil die Achslastwaagen hinter der Schwelle positioniert werden.
Um während der Simulation zu jedem Zeitpunkt die Schwellenhöhe unter den Rädern bestimmen zu können, wurden die Schwellenteilabschnitte als Funktionen hinterlegt. Da je Schwellenabschnitt drei Formen möglich sind und die Höhe des Messprofils berücksichtigt wird, ergeben sich zehn Funktionen die zur Beschreibung der Schwelle dienen. Siehe Anlage 1.
Die für die Simulation relevanten Fahrzeugparameter lassen sich unter dem Register „Fz“ auswählen. Siehe Abbildung. Die hierbei erzeugten Fahrzeugdaten können zusätzlich im Register „Para“ geändert werden.
Im Register „Fz“ erfolgt die Fahrzeugauswahl. Anhand dieser Auswahl werden die Fahrzeugdaten: Radstand, Länge, Breite, Höhe, Raddurchmesser, Masse, Schwerpunktlage, Radmasse, Federsteifigkeit sowie die Dämpfungskonstante der Reifen und der Stoßdämpfer aus einer csv-Datei eingelesen. Dies hat den Vorteil, dass durch erweitern der csv-Datei ohne großen Programmieraufwand weitere Fahrzeuge simuliert werden können. Des Weiteren kann die Fahrzeuggeschwindigkeit während der Simulation festgelegt werden. Die Entfernung von der Schwelle gibt den Abstand zwischen Hinterachse und Schwellenbeginn beim Start der Simulation vor. Die gewählte Stoßdämpfergüte wird als Faktor mit der Dämpfungskonstante des jeweiligen Stoßdämpfers berechnet. Bei einem Fahrzeug, dessen Stoßdämpfer im Neuzustand eine Dämpfungskonstante von 1900Ns/m aufweisen und einer Stoßdämpfergüte von 50%, ergibt sich somit eine Restdämpfungskonstante von 950Ns/m welche in der Simulation verwendet wird.
Im Register „Para“ ergibt sich die Möglichkeit durch das Ändern einzelner Fahrzeugdaten die Auswirkung dieser auf die Simulationsergebnisse zu beurteilen. Außerdem können Fahrzeugdaten welche geschätzt werden mussten durch den Vergleich von Simulations- und Messdaten auf diese Weise angepasst werden. Die Anpassung der Fahrzeugdaten erfolgt wie die Einstellung der Stoßdämpfergüte prozentual mit Hilfe eines Schiebereglers.Simulationsablauf
Durch betätigen der „Start“ Schaltfläche wird die Simulation gestartet. Dazu werden zunächst alle Eingabeparameter eingelesen. Anschließend erfolgt der Einschwingvorgang. Das System befindet sich aufgrund der Erdbeschleunigung auf den Aufbau Schwerpunkt sowie auf die Radmassen nicht in Ruhelage. Diese Anregung des Federsystems würde sich mit den Simulationsergebnissen überlagern. Um dies zu verhindern, wird das Federmodell ohne erneute Anregung mehrfach ausgeführt, sodass das Federsystem ausschwingen kann und der Zustand der Ruhelage erreicht wird. Die Anzahl der Wiederholungen bis zum Erreichen der Ruhelage wurde empirisch für verschiedene Dämpferkonstanten ermittelt und auf 500000 festgelegt. Der Inhalt des Zustandsvektors nach dem Einschwingen wird gespeichert. Diese Zustandsgrößen stellen die Ausgangsgrößen für die Simulation dar und können somit als Offsetgrößen verwendet werden.
Im Anschluss erfolgt die Berechnung der vom Fahrzeug zurückgelegten Strecke pro Simulationsschritt.
xstep =vFz /(3,6*fsim )
Sowie die Berechnung der benötigten Simulationsschritte.
steps=(3.6(4lstart +lSchwelle ) fsim )/vFz
Um die Möglichkeit zu schaffen, Einfluss auf die Anzahl an Simulationsschritten nach dem Überqueren der Schwelle zu nehmen, wurde für diese Berechnung der Wert lstart mit dem Faktor 4 multipliziert. Dadurch ergibt sich die Länge der Simulationsstrecke nach überqueren der Schwelle zu 3lstart. Damit kann Einfluss auf die Simulationsschritte genommen werden, ohne ein zusätzliches Eingabeelement dafür zu verwenden.
Als nächstes wird für jede Zustandsgröße und jede Übergangsgröße welche das Federsystem berechnet eine Matrix mit einer Spalte und Zeilen entsprechend der Anzahl der Simulationsschritte angelegt. In dieser Ergebnismatrix wird während der Simulation der Wert jedes Simulationsschrittes abgelegt.
Anschließend erfolgt der erste Simulationsschritt. Dabei wird der Radaufstandspunkt jedes Rades um die Strecke xStep in X-Richtung verschoben. An der Stelle des Radaufstandspunktes wird nun die Höhe (z) der Schwelle mithilfe der Schwellenfunktionen berechnet. Befindet sich das Rad außerhalb der Grenzen, in denen die Schwellenfunktionen gelten, so befindet sich das Rad vor oder hinter der Schwelle in diesem Fall beträgt die Höhe 0m. Diese Höheninformationen werden als Anregung auf das Federmodell gegeben. Nach der Berechnung des Federmodells, werden die Ergebnisse aus dem Zustandsvektor in der Ergebnismatrix in der Zeile des entsprechenden Simulationsschrittes gespeichert. Dieser Vorgang wird wiederholt, bis die errechnete Anzahl von Simulationsschritten erreicht ist.
Als Simulationsergebnisse liegen die Ergebnismatrizen der Zustandsgrößen und Übergangsgrößen vor.
Simulationsausgabe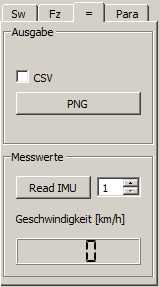
Über das Register „=“ können die Ausgabe- und Auswertungsoptionen eingestellt werden. Siehe Abbildung. Durch die Auswahl des CSV-Kontrollkästchens vor dem Beginn der Simulation, werden alle Simulationsergebnisse zur späteren Weiterverarbeitung in eine CSV-Datei geschrieben. Damit ist eine Schnittstelle zu anderer Software zur Auswertung wie Matlab oder Excel geschaffen. Durch das Betätigen der „PNG“ Schaltfläche können alle Graphen als Bilddateien in ein PNG-Format exportiert werden. Außerdem können Messwerte eingelesen und angezeigt werden. Anhand der eingelesenen Messwerte wird die durchschnittliche Überfahrgeschwindigkeit der eingelesenen Messung berechnet und angezeigt.
Darstellung der Simulationsergebnisse
Zur grafischen Darstellung werden zunächst nur die Aufbaubewegungen Nickrate, Auslenkung, Geschwindigkeit, Beschleunigung sowie die Auslenkung, Geschwindigkeit und Beschleunigung der Räder genutzt. Die Bezugsachse der translatorischen Bewegungen ist hierbei die z-Achse. Diese Größen liegen als Simulationsergebnis in den Ergebnismatrizen vor.
Die grafische Darstellung erfolgt mit dem Widget „QCustom Plot“. Dieses ermöglicht die Anzeige von Graphen und Diagrammen. Für jeden Graph wird ein eigenes Widget verwendet. Diesem wird jeweils eine Matrize für die Ordinate und die Abszisse übergeben. Der Anzeigebereich der Ordinate wurde so angepasst, dass er vom Minimalwert bis zum Maximalwert der Ordinatenmatrize festgesetzt wird. Der Anzeigebereich der Abszisse, welcher in den meisten Fällen die Zeitachse darstellt, erstreckt sich über den gesamten Simulationszeitraum. Dieser Bereich ist jedoch variabel. Um eine bessere Auswertung zu gewährleisten, wurde ermöglich, diesen Bereich mit Hilfe des Mausrades zu verkleinern und zu vergrößern. Außerdem lässt sich der gesamte Bereich durch gedrückt halten der linken Maustaste verschieben.
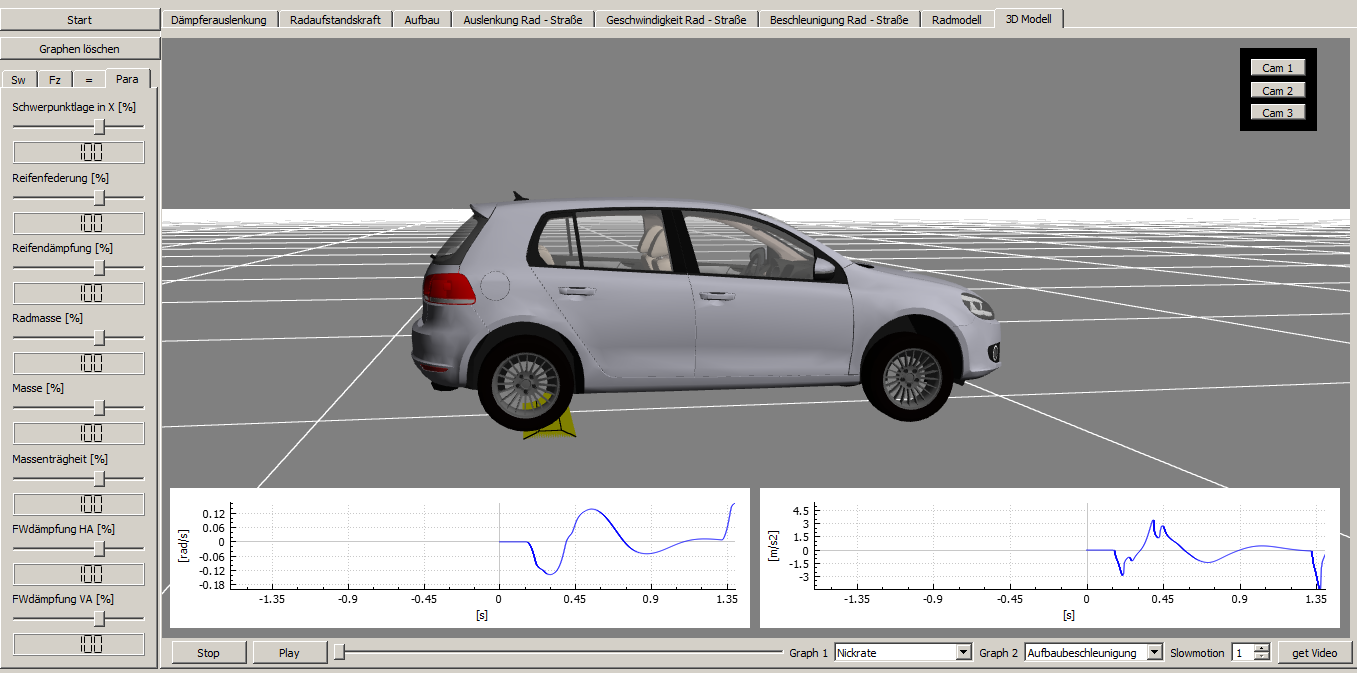
Animation des 3D Modells
Um die Schwellenüberfahrt zu veranschaulichen, wird die Überfahrt mit 3D Modellen dargestellt. Durch das OpenGL Widget ist es möglich 3D Elemente zu laden, zu erstellen und darzustellen. Zunächst wurden dafür die Position des Betrachters im Raum sowie dessen Blickrichtung festgesetzt. Anschließend werden alle benötigten Objekte geladen. Dies sind die Fahrzeugkarosserie und die Räder. Anschließend erfolgt deren Positionierung im Raum, da der Bezugspunkt des 3D Modells nicht mit dem des Simulationsmodells übereinstimmt, musste zur Positionsbestimmung des 3D Modells aus der Position des Simulationsmodells eine Umrechnung erfolgen. Die Modelle wurden aus frei erhältlichen Vorlagen des Programmes „Google Sketchup“ erstellt und liegen als obj-Dateien vor. Die Schwelle wird aus Polygonen erzeugt welche durch die Schwellenfunktionen definiert werden. Die Breite der Schwelle ergibt sich aus der Fahrzeugbreite. Um die 3D Modelle zu animieren, wurde ein Timer angelegt. Dieser legt das Aktualisierungsintervall der Objekte fest. Dieser wurde auf 40ms gesetzt, was einem Video mit 25fps entspricht. Während eines Aktualisierungsintervalls werden die Koordinaten der Ergebnismatrizen der Simulation für das nächste Bild an die Koordinaten der 3D Objekte übergeben. Da die Simulationsrate mit 20000Hz deutlich größer ist als das Aktualisierungsintervall von 25fps, wird zur Animation nur jeder 800ste Simulationswert verwendet.Zusätzlich wird in diesem Anzeigefeld der Verlauf der Simulationsergebnisse angezeigt. Diese werden entsprechend der aktuellen Simulationszeit angezeigt, sodass eine Zuordnung von optischen Eindrücken wie beispielsweise dem Auffahren auf die Schwelle und einer dadurch verursachten Änderung der Nickrate erfolgen kann. Um diese Auswertung zu erleichtern, kann die Animation verlangsamt und pausiert, sowie auf der Zeitachse durch einen Schieberegler jeder Zeitpunkt ausgewählt werden. Des Weiteren wurden drei Betrachtungsperspektiven vordefiniert, zwischen denen gewählt werden kann. Zu Präsentationszwecken kann die Animation inklusive der animierten Graphen in eine Videodatei exportiert werden.
Messdaten
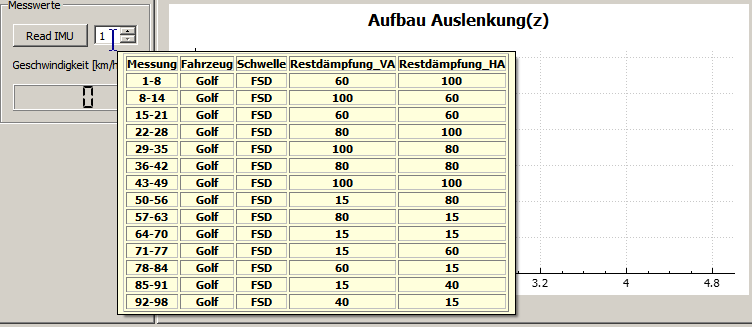
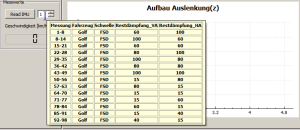
Die bereits vorhandenen Messungen mit der IMU sollen eingelesen und in der Benutzeroberfläche dargestellt werden, um die Simulationsergebnisse mit den Messwerten vergleichen zu können. Zu diesem Zweck können die von der IMU erzeugten Messdaten ohne weitere Bearbeitungsschritte eingelesen werden. Somit können zukünftige Messungen mit dieser IMU sofort eingelesen und ausgewertet werden. Um den Überblick über die Messreihen nicht zu verlieren, wurde eine Anzeige, welche die Überfahrtparameter beinhaltet, eingefügt. Diese erscheint wenn der Mauszeiger über der Auswahlbox für die Messreihe gehalten wird.
Die Berechnung der durchschnittlichen Überfahrgeschwindigkeit anhand der Messwerte, erfolgt anhand der Aufbaubeschleunigung (z). Die zwei Maxima entstehen durch die Anregung beim Verlassen der Schwelle von der vorderen bzw. der hinteren Achse. Da der Radstand des Fahrzeuges bekannt ist, kann über die Zeitdifferenz dieser Maxima die Überfahrgeschwindigkeit berechnet werden.
v=lRadstand /∆t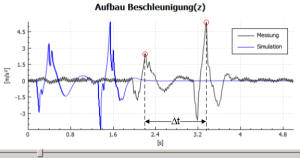
Mit Hilfe des Schiebereglers kann das zeitliche Offset zwischen Simulations- und Messwerten ausgeglichen werden. Dazu wird je nach Stellung des Schiebereglers ein Offsetwert zwischen -5s und 5s auf die Zeitwerte der Messung addiert.
Erweiterung des Radmodells
Bei dem ursprünglichen Modell wird die Höhe der Schwelle bzw. der Fahrbahn am aktuellen Radaufstandspunkt als Anregung an das Federsystem übergeben. Während einer realen Überfahrt rollt sich das Rad jedoch über die Kanten der Schwelle ab. Um diesen Abrollvorgang zu simulieren, wurde das Radmodell erweitert. Dafür wird zunächst die Position des Radmittelpunktes für den folgenden Simulationsschritt berechnet. Dafür werden die Koordinaten des Radmittelpunktes im vorherigen Simulationsschritt verwendet und die in X-Richtung zurückgelegte Strecke pro Simulationsschritt xstep addiert. Diese stellen die Ausgangskoordinaten des iterativen Berechnungsverfahrens dar. Um den Radmittelpunkt PRM werden in der XZ-Ebene Radpunkte berechnet. Der Abstand zwischen Radmittelpunkt und den Radpunkten Rx entspricht dem Radius des Rades. Auf der unteren Hälfte des Rades werden die Koordinaten von 40 gleichmäßig verteilten Radpunkten berechnet.
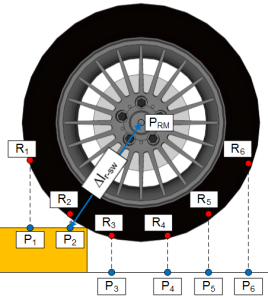
Zur besseren Übersicht wurden hier jedoch nur sechs Radpunkte verwendet. Im nächsten Schritt wird die Höhe der Fahrbahn bzw. der Schwelle unter den Radpunkten abgefragt. Die Abstände dieser neuen Punkte Px vom Radmittelpunkt PRM dienen als Auswahlkriterium für den nächsten Berechnungsschritt. Der Punkt mit dem geringsten Abstand zum Radmittelpunkt ist dem aktuellen Radaufstandspunkt am nächsten. In der Abbildung ist dieser Referenzpunkt P2. Um den Radaufstandspunkt näher zu bestimmen, werden im Bereich zwischen R1 und R3 weitere Radpunkte berechnet. In der Simulation werden in diesem Bereich weitere 40 Radpunkte gesetzt.
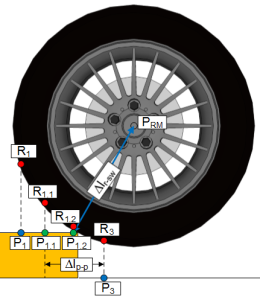
In obenstehender Abbildung ist dies vereinfacht mit vier Radpunkten dargestellt. Um den Radaufstandspunkt für die Simulation ausreichend genau anzunähern, wird dieser Vorgang, während dessen ein Bereich ausgewählt und weitere Radpunkte gesetzt werden, solange wiederholt bis die aktuelle Bereichsgrenze in X-Richtung kleiner ist als xstep. Diese Bereichsgrenze ist als ∆lp-p dargestellt. Die Entfernung des Rades von der Fahrbahn, welche an das Federsystem weitergeben wird, kann nun aus der Höhe der Schwelle unter dem ermittelten Radaufstandspunkt und dem Abstand zwischen Radaufstandspunkt und Radmittelpunkt in X-Richtung berechnet werden.
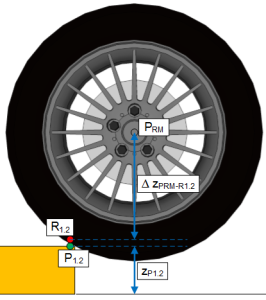
Für den in der oben stehenden Abbildung dargestellten Fall würde der Abstand zwischen Fahrbahn und Rad wie folgt berechnet werden:
zRad = zP1.2 + Δ zPRM-R1.2
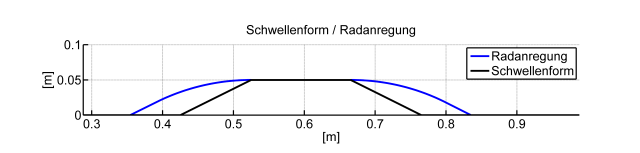
Infolge dieser Erweiterung entsteht für die verwendete Temposchwelle folgende Abrollbewegung, welche gleichzeitig der Radanregung für das Federmodell entspricht:
Erweiterung der Dämpfersimulation
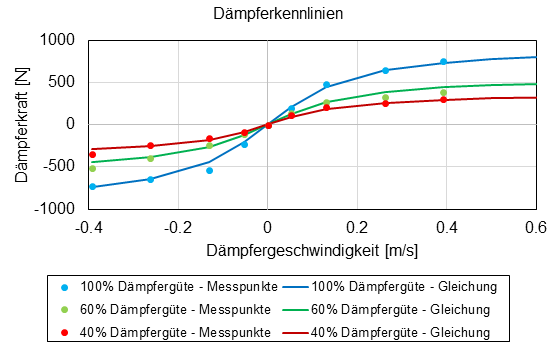
Die Stoßdämpfer werden im bisherigen Modell durch eine Dämpferkonstante simuliert, welche prozentual mit der Dämpfergüte verrechnet wird. Diese soll durch eine Dämpferkennlinie ersetzt werden. Bereits vor Beginn der Diplomarbeit wurde die Dämpferkraft von Stoßdämpfern mit verschiedenem Verschleißgrad bei unterschiedlichen Dämpfergeschwindigkeiten bestimmt. Diese sind als Messpunkte in nachfolgender Abbildung dargestellt.
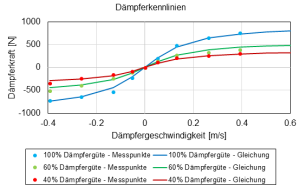
Um in der Simulation jeder Dämpfergeschwindigkeit eine Dämpferkraft zuordnen zu können, wurden Gleichungen bestimmt. Diese lassen sich auf eine Gleichung mit den zwei Variablen Dämpferzustand und Dämpfergeschwindigkeit zurückführen.
FDämpfer = arctan (vDämpfer *7)*600*Dämpferzustand/100
Die aktuelle Dämpfergeschwindigkeit während der Simulation lässt sich aus der Relativbewegung zwischen Aufbau und Radmittelpunkt aus der Ergebnismatrix berechnen. Somit kann für jeden Simulationsschritt die aktuelle Dämpferkraft berechnet werden.
Zusammenfassung
Das Ziel dieser Diplomarbeit war das Erstellen einer Benutzeroberfläche zur Simulation von Schwellenüberfahrten sowie die Simulation verschiedener Überfahrten zur Ableitung neuer Prüfvorschriften. Mithilfe der erstellten Software können verschiedenste Überfahrtszenarien in kürzester Zeit erstellt, simuliert und anschaulich dargestellt werden. Durch die Möglichkeit des Exportes der Simulationsdaten können diese durch andere Programme wie Matlab oder Excel ausgewertet werden. Die Modellerweiterungen führten zu Simulationsergebnissen, welche eine gute Übereinstimmung mit realen Messwerten aufweisen. Dadurch können aus der Simulation gewonnene Erkenntnisse auf reale Messungen angewandt werden. Auf Basis der erstellten Software wurde eine Schwellenform definiert sowie eine Überfahrgeschwindigkeit ermittelt, welche eine bestmögliche Interpretation der Mess- und Simulationsergebnisse zur Stoßdämpferprüfung ermöglichen.