
Herzlich willkommen auf den Informationsseiten des Labors für Kfz-Mechatronik der HTW Dresden.
Welcome at the information pages of the laboratory for automotive mechatronics of HTW Dresden.
Kontakt/Contact: trautmann@htw-dresden.de
MechCar – Test Car on the Road (at the moment in Dresden)
Diploma thesis defended // Diplomarbeit verteidigt
On August 29, 2023, Tristan Weiland successfully defended his diploma thesis on the topic “Development of an algorithm for determining the vehicle trajectory and mapping the environment using lidar sensors”.
Am 29.08.2023 verteidigte Tristan Weiland erfolgreich siene Diplomarbeit zum Thema „Entwicklung eines Algorithmus zur Bestimmung der Fahrzeugtrajektorie und Kartierung der Umgebung mittels Lidar-Sensorik“.
Visiting Summer School // 參觀暑期學校
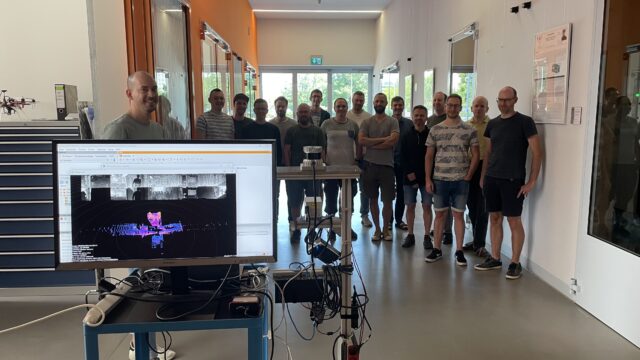
On August 2nd, 2023, students from various Chinese universities visited the laboratory for automotive mechatronics at the HTW Dresden (Mechlab). The Mechlab team first gave an introduction to automated driving functions before presenting various lidar sensors in a live demonstration. The visit was organized by the China Center of the HTW Dresden under the direction of Prof. Yujie Yao.
2023年8月2日,來自中國多所大學的學生參觀了德累斯頓HTW汽車機電一體化實驗室(Mechlab)。 Mechlab團隊首先介紹了自動駕駛功能,然後在現場演示中展示了各種激光雷達傳感器。 此次訪問是由德累斯頓HTW中國中心在姚玉杰教授的指導下組織的。



First training conducted // Erste Schulung durchgeführt
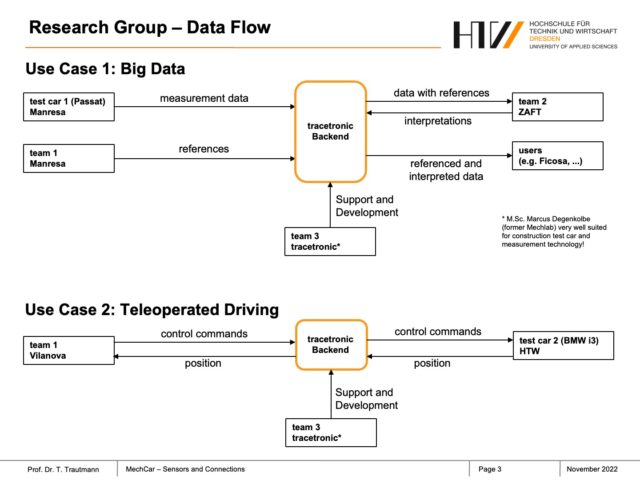
The first training course for employees of TraceTronic and neocx took place on June 12, 2023 to impart knowledge in the field of vehicle environment sensors. In addition to theory, practical demonstrations were also carried out using ultrasonic and lidar sensors. The highlight was of course the presentation of the lidar integration in the TraceTronic software ECU-TEST.
Zur Vermittlung von Kenntnissen im Bereich der Fahrzeug-Umfeldsensorik fand am 12.06.2023 die erste Schulung für Mitarbeiter der Firmen TraceTronic und neocx statt. Neben der Theorie wurden auch praktische Vorführungen mit Ultrschall- und Lidarsensorik durchgeführt. Höhepunkt war selbstverständlich die Vorstellung der Lidar-Integration in der TraceTronic-Software ECU-TEST.


Eastern partnerships conference // Tagung OstpartnerschaftenEastern partnerships conference //
From 06.06.-08.06.2023 a conference to intensify the cooperation with the partner universities in Eastern Europe took place at the HTW. At the end there was a presentation of teleoperated driving on the HTW test field. After a short briefing by the diploma student Nils Bigl, Prof. Bohacs from the BME Budapest was able to steer his colleagues safely over the course.
Vom 06.06.-08.06.2023 fand an der HTW eine Tagung zur Vertiefung der Zusammenarbeit mit den Partneruniversitäten des osteuropäischen Raums statt. Zum Abschluss erfolgte eine Präsentation des teleoperierten Fahrens auf dem HTW-Prüffeld. Nach einer kurzen Einweisung durch den Diplomanden Nils Bigl konnte Prof. Bohacs von der BME Budapest seine Kolleginnen und Kollegen sicher über den Parquours steuern.






New Matlab course // Neuer Matlab-Kurs
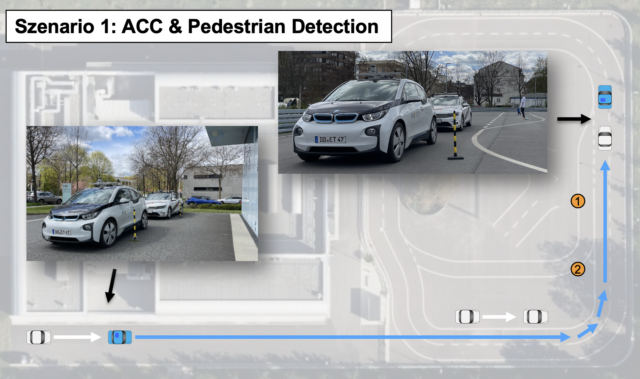
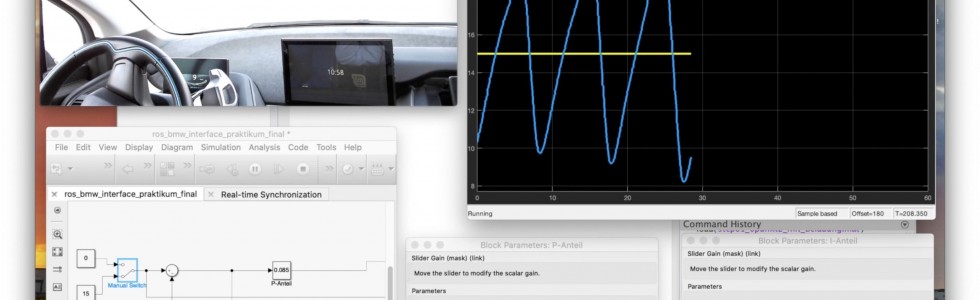
As part of the „Automated Driving Functions“ (AutoFahr) course, the students process the measurement results of various test drives on the test site of the HTW Dresden with Matlab. Various objects (parked vehicles, people) are detected and classified using lidar. The results are documented with the Matlab function publish() in html-format. An example of the evaluation can be found here:
Im Rahmen der Lehrveranstaltung „Automatisierte Fahrfunktionen“ (AutoFahr) bearbeiten die Studierenden die Messergebnisse verschiedener Testfahrten auf dem Testgelände der HTW Dresden mit Matlab. Es werden mittels Lidar unterschiedliche Objekte (parkende Fahrzeuge, Personen) detektiert und klassifiziert. Die Dokumentation der Ergebnisse erfolgt mit der Matlab-Funktion publish() im html-Format. Ein Beispiel für die Auswertung ist hier zu finden:
Example of documentation // Auswertungsbeispiel