| Thema | Analyse des Potentials der WLAN-Signalstärke als Parameter für ein Fahrerassistenzsystem zur Fahrradfahrer-Detektion |
|---|---|
| Bearbeitungszeitraum | Juni 2013 bis November 2013 |
| Betreuer | Prof. Dr. rer. nat. Toralf Trautmann Dipl.-Ing (FH) Erik Unger |
Aufgabenbeschreibung
Aufgrund ihrer schmalen Silhouette und oft hohen Geschwindigkeit werden Fahrradfahrer häufig von abbiegenden Kraftfahrzeugen übersehen. Ein Fahrerassistenzsystem zur Fahrradfahrer-Detektion kann diese Gefahr mindern. Angesichts der großen Verbreitung von Smartphones mit WLAN-Modulen ist es denkbar, die WLAN-Signalstärke eines auf einem Smartphone eingerichteten WLANs für ein solches Assistenzsystem einzusetzen. Im Rahmen dieser Diplomarbeit soll das Potential dieser Technik abgeschätzt werden.
Messtechnik
Die WLAN-Signalstärke wird mit einem RF Explorer der Firma seeed studio gemessen. Bei diesem Gerät handelt es sich um einen Spektrumanalysator der speziell für das 2,4 GHz-Band ausgelegt ist. Dieser Spektrumanalysator gibt einen Pegel als Funktion der Frequenz aus. Als Antenne kommt eine Richtantenne von TP-Link zum Einsatz, da nur die Signalstärke von Signalen hinter dem Auto interessieren. Die Richtantenne detektiert allerdings auch Signale die von hinter ihr kommen, diese aber stark gedämpft. Zur Abstandsmessung kommt der Lidar-Sensor Hella IDIS V2.0 zum Einsatz. Des Weiteren läuft ein Radar-Sensor der Firma M/A-COM während den Messungen mit um zu überprüfen, ob dessen Daten mit denen des Spektrumanalysators fusionierbar sind.
Die Sensoren werden an einem Mast befestigt der dann hinter das Fahrzeug gestellt wird. Hierbei ist noch die Position der WLAN-Antenne hervorzuheben. Je nach Messszenario wird sie auf entweder auf Höhe der Stoßstange, ca. 0,55 m über dem Boden, oder auf Höhe des Smartphones, rund 1,05 m über dem Boden, befestigt.
Als WLAN-Sender kommen zwei verschiedene Smartphones zum Einsatz um Unterschiede zwischen ihnen zu ermitteln. Das eine ist ein Samsung Galaxy S2, das andere ein LG Optimus L7. Um ein möglichst durchgängiges Signal zu erhalten muss eine Datenübertragung gestartet werden, wofür es mehrere Möglichkeiten gibt. Hier wurden zum einen das Transmission Control Protocol (TCP) und das User Datagram Protocol (UDP) benutzt. Der bedeutendste Unterschied zwischen den Protokollen ist der, dass das TCP-Protokoll ein verbindungsorientiertes Protokoll ist , d.h. der Empfänger einer Nachricht wird den fehlerlosen Empfang immer bestätigen, während das UDP-Protokoll ein verbindungsloses Protokoll ist bei der der fehlerfreie Empfang nicht überprüft wird. Für beide Protokolle muss zunächst ein Access-Point auf einem Smartphone gestartet werden. Mit Hilfe eines FTP-Clients auf dem Smartphone und einem FTP-Server auf dem Laptop kann eine Datei vom Smartphone zum Computer mithilfe des TCP-Protokolls gesendet werden. Zur Versendung von UDP-Datenpaketen wird eine leicht abgeänderte Version der App Easy Packet Blast von Hunter Davis verwendet.
Theoretisches Abstandsgesetz
Um nachfolgend einen Zusammenhang zwischen Signalstärke und Abstand zur Empfangsantenne zu erhalten muss die generelle Korrelation der beiden Größen bekannt sein. Hierfür ist das Abstandsgesetz für Energiegrößen heranzuziehen, wobei P1 und P2 zwei Leistungen darstellen die in den Abständen r1 und r2 vom Sender entfernt stehen.
[math]\frac{P_2}{P_1}=(\frac{r_1}{r_2})^{2}[/math]
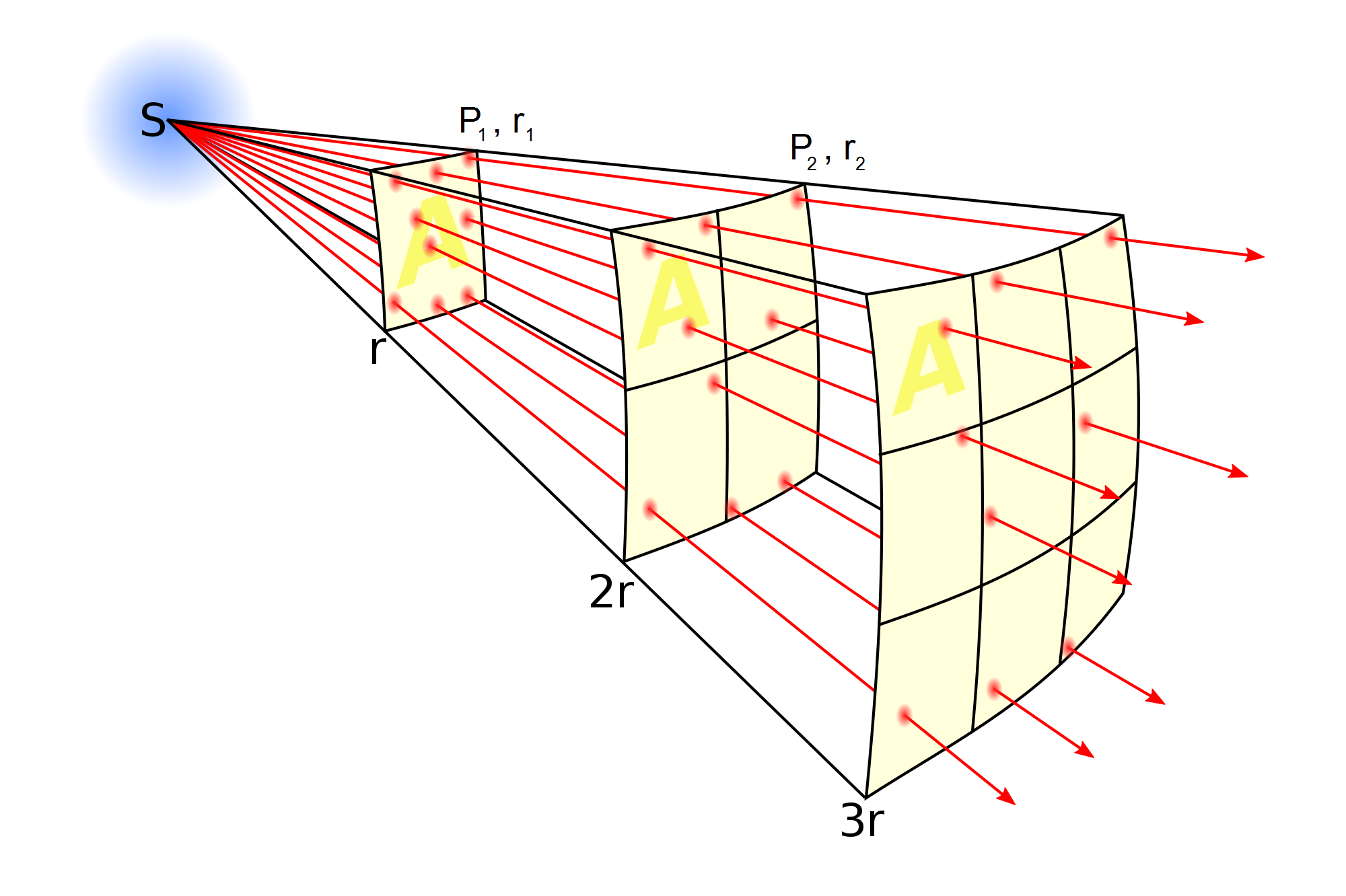
Quelle: http://commons.wikimedia.org/wiki/File:Inverse_square_law.svg
{kind=link}
Da die Leistungswerte leicht mehrere Zehnerpotenzen überschreiten wird mit logarithmischen Pegelwerten gearbeitet. Somit folgt ein Leistungspegel Lp der das Verhältnis zweier Leistungen in Watt in der Einheit Dezibel (db) darstellt:
[math]L_p(dB)=10\cdot\log_{10}(\frac{P_2}{P_1}) [/math]
Daraus folgt für den Leistungspegel zweier Emfpänger in unterschiedlicher Distanz zum Sender:
[math]L_p(dB)=10\cdot\log_{10}(\frac{r_1}{r_2})^{2}=20\cdot\log_{10}(\frac{r_1}{r_2})[/math]
Des Weiteren soll noch die Einheit Dezibelmilliwatt (dBm) erläutert werden, da sie in den folgenden Diagrammen enthalten sein wird. Mit dieser Einheit wird ein Verhältnis einer Leistung zu einer Bezugsleistung von einem Milliwatt angegeben.
[math]L_p(dBm)=10\cdot\log_{10}(\frac{P}{1 mW})[/math]
Somit folgt eine zweite Formulierung des Abstandsgesetzes:
[math]L_{p,2}(dBm)=L_{p,1}+20\cdot\log_{10}(\frac{r_1}{r_2})[/math]
Daraus resultiert das Modell, dass im folgenden für den Zusammenhang zwischen Abstand und Signalstärke verwendet wird:
[math]y=m\cdot\log_{10}(x) + b[/math]
Hierbei ist y die Signalstärke und x der Abstand von der Antenne. Die Parameter m und n dieses Modells werden über die Methode der kleinsten Quadrate ermittelt.
Messwerte des RF-Explorers
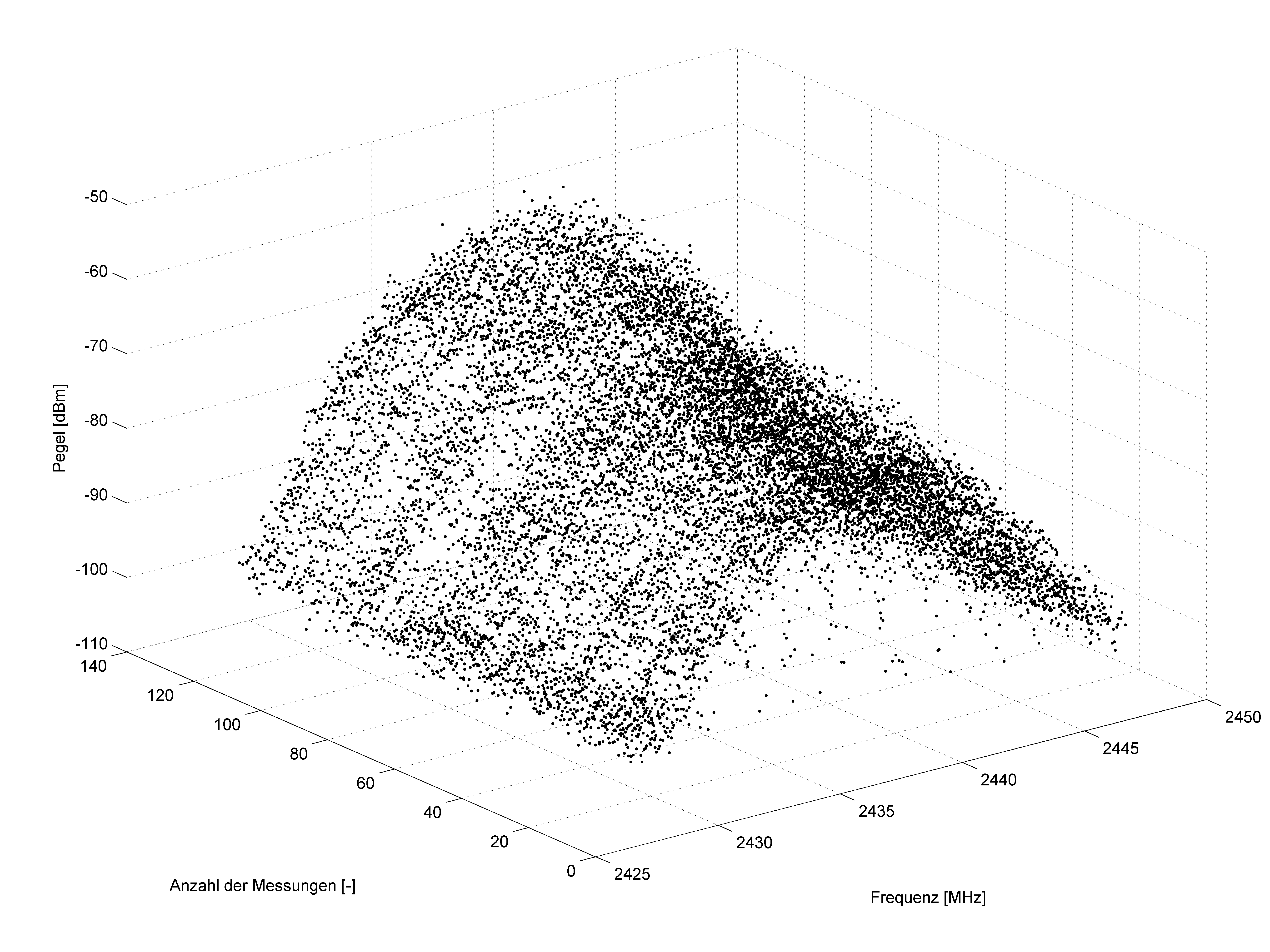
Obiges Diagramm zeigt ein Beispieldiagramm der Daten die vom RF-Explorer geliefert werden. Zu sehen ist, dass die Messung aus mehreren Messschrieben besteht, die jeweils 112 Pegelmesswerte zu 112 entsprechenden Frequenzen enthalten. Diese dreidimensionalität der Daten ist für die weitere Auswertung hinderlich, daher soll eine Dimension gekürzt werden. Um dies zu bewerkstelligen werden sämtliche Signalstärken eines Messschriebs gemittelt. Somit erhält man für jeden Messschrieb einen einzigen Messwert.
Statische Messungen
Die ersten Messungen werden auf einem Feldweg nahe Kautzsch durchgeführt. Hierbei soll ein Zusammenhang zwischen WLAN-Signalstärke und Abstand unter idealen Bedingungen ermittelt werden.
Bei diesen Messungen stellt sich eine Person mit dem sendenden Smartphone hinter das Messfahrzeug hinter dem die Sensorik aufgebaut ist. Daraufhin wird eine Messung gestartet. Nach der Aufnahme von 300 Messschrieben, also rund 30 Sekunden, wird die Messung beendet. Es sind nun Abstände aus den Daten des Laserscanner und dazu passende WLAN-Signalstärken vorhanden. Nach jeder Messung geht die Person mit dem Smartphone einen Schritt vom Auto weg und es wird eine Neue gestartet. Dies wird 20 mal wiederholt. Bei den statischen Messungen wurde die WLAN-Antenne in einer Höhe von rund 0,55 m befestigt.
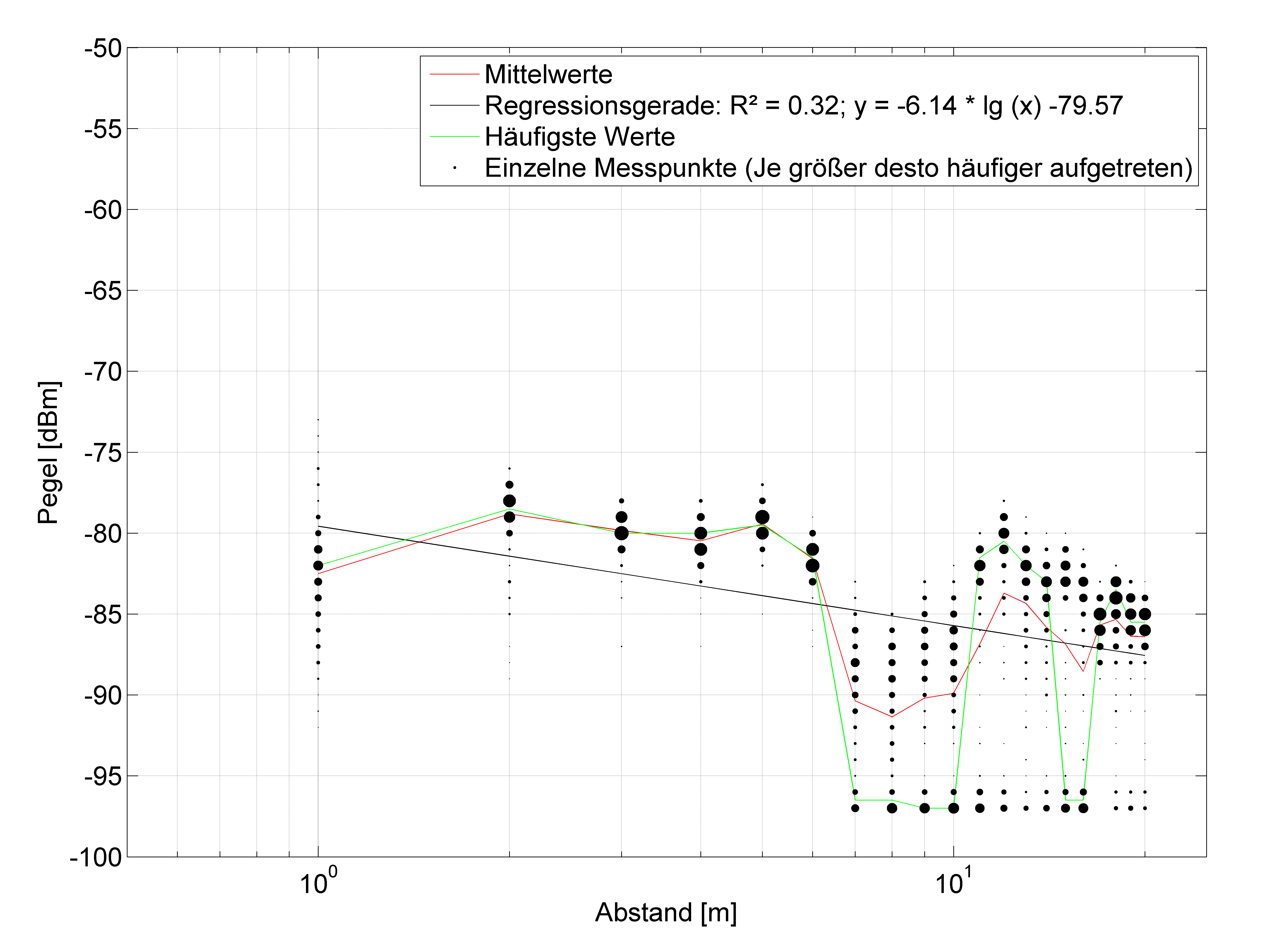
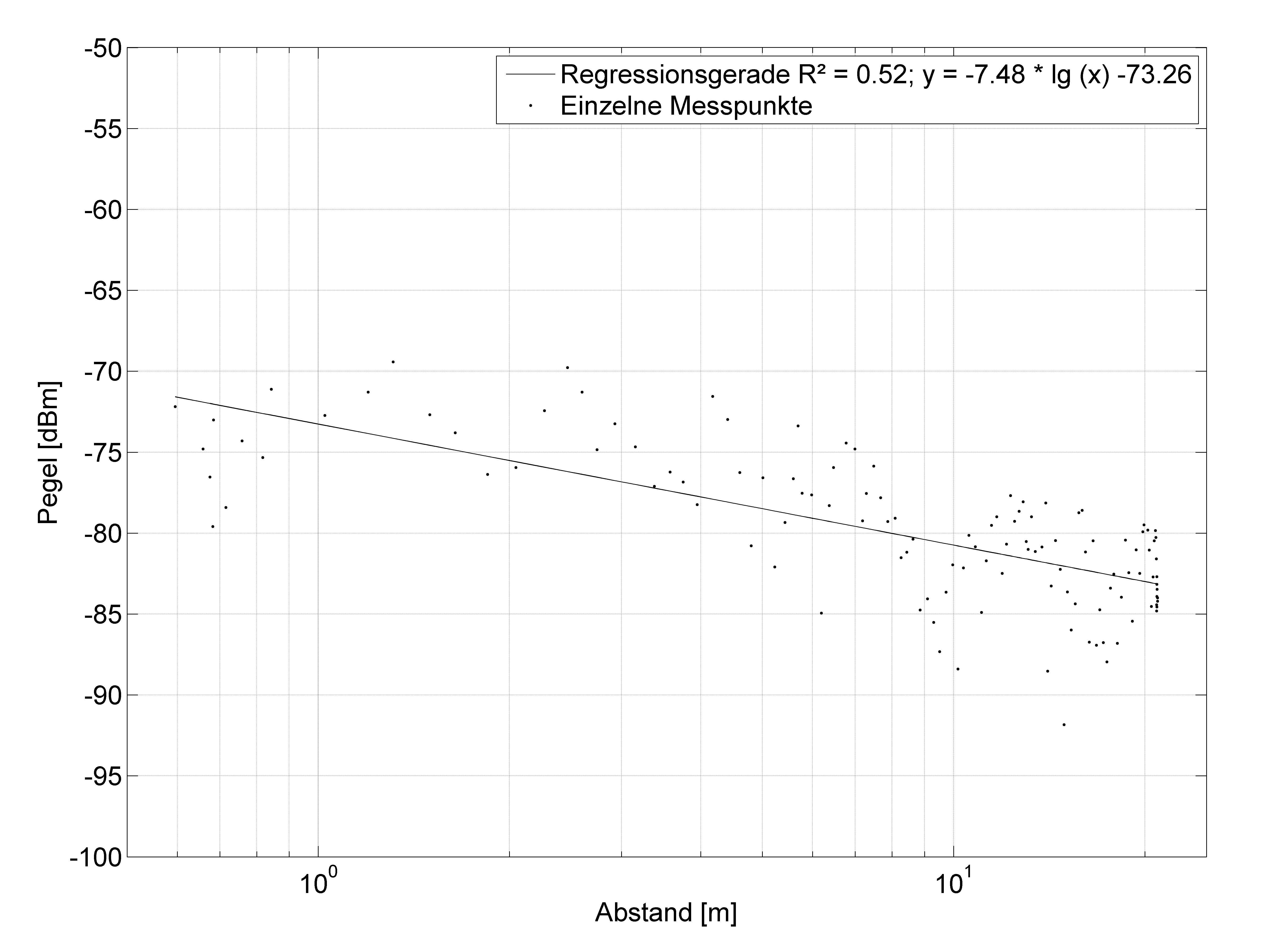
Obiges Bild zeigt eine statische Messreihe die mithilfe des LG Optimus L7 und des TCP-Protokolls aufgenommen wurde. Die x-Achse zeigt den Abstand vom Smartphone zur Empfangsantenne hinter dem Fahrzeug, die y-Achse den gemittelten Pegel eines Messschriebes. Je häufiger ein Pegel während einer Messung aufgetreten ist desto größer ist der entsprechende Punkt im Diagramm dargestellt. Die rote Kurve verläuft durch jeweils den gemittelten Pegel einer Messung, während die grüne Kurve durch den am häufigsten aufgetretenen Pegel verläuft. Des Weiteren ist eine Regressionsgerade zu sehen, denn laut Abstandsgesetz besteht ein linearer Zusammenhang zwischen dem Signalpegel und dem logarithmierten Abstand. Außerdem ist noch die Geradengleichung der Regressionsgerade sowie der Determinationskoeffizient dargestellt.
In dieser Messung ist zwar eine abfallende Tendenz des Pegels mit steigender Entfernung zur Antenne zu erkennen, jedoch lässt der niedrige Determinationskoeffizient auf eine schlechte Übereinstimmung von Modell und Messwerten schließen. Außerdem ist die sehr hohe Streuung der Messwerte hervorzuheben.
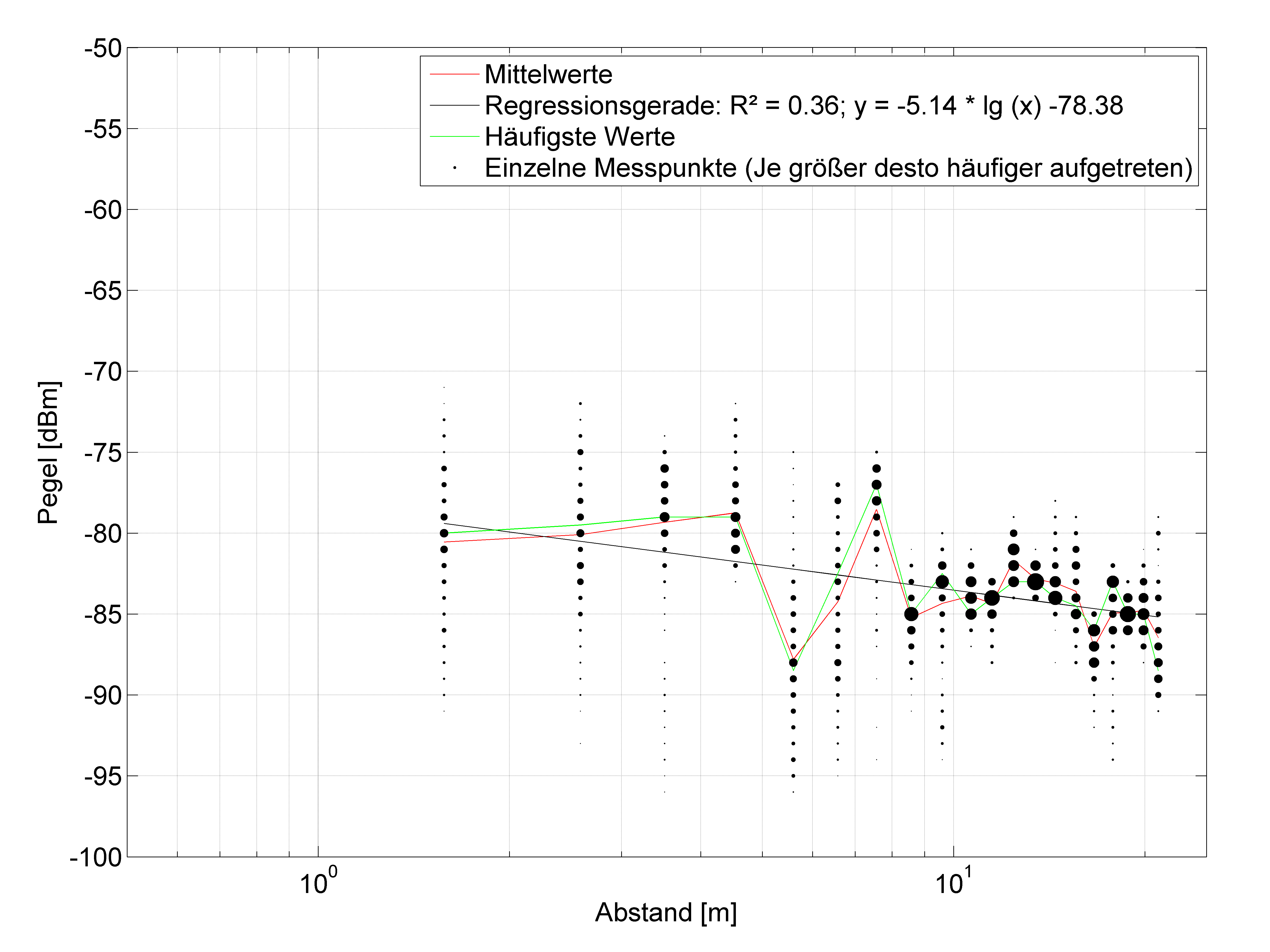
Dieses Diagramm zeigt nun eine Messreihe die auch mit dem L7 aufgenommen wurde, nun aber mithilfe des UDP-Protokolls. Zu sehen ist eine ähnliche Geradengleichung und ein ähnlich niedriger Determinationskoeffizient wie in der vorhergehenden Messung. Auffälligster Unterschied ist das Fehlen der häufig aufgetretenen Ausreißer mit den Signalpegeln von rund -97 dB bei den größeren Abständen. Diese könnten aus den gesendeten Bestätigungen des Messcomputers im Fahrzeug resultieren, die bei TCP-Paketen nicht vermieden werden können.
Problematisch bei diesen Messungen ist der hohe Aufwand um die Parameter für ein Modell zu ermitteln. Nach durchschnittlich zwei Messreihen mit dem Optimus L7 war der Akku des Smartphones leer und musste über eine Stunde wieder aufgeladen werden. Daher wurde auf weitere statische Messungen verzichtet und zu den dynamischen Messungen übergegangen die ähnliche Ergebnisse zeigen. Die folgenden Messungen werden ausschließlich mit dem UDP-Protokoll durchgeführt.
Dynamische Messungen
Die dynamischen Messungen werden wie folgt durchgeführt. Eine Person mit dem sendenden Smartphone bewegt sich aus rund 20 m auf die Empfangsantenne zu, dabei läuft neben dem RF-Explorer auch der Laserscanner als Referenzmessung. Diese Messungen werden für jedes Messszenario je fünfmal durchgeführt. Desweiteren müssen hier die Daten des Laserscanners mit denen des RF-Explorers fusioniert werden. Problematisch hierbei ist die nicht bekannte Abtastrate des RF-Explorers. Um dieses Problem zu beheben werden die Messwerte des Spektrumanalysators gleichmäßig über den durch den Laserscanner bekannten Messzeitraum verteilt.
Dieses Diagramm zeigt eine solche dynamische Messung die ebenfalls auf obigem Feldweg durchgeführt wurde. Die Position der Antenne war auch hier auf Höhe der Stoßstange. Die ermittelte Geradengleichung unterscheidet sich nicht sehr stark von denen die mit dem statischen Messverfahren aufgenommen wurden. Auffällig ist hier die periodische Schwankung der Messwerte. Grund dafür sind Reflexion der elektromagnetischen Wellen am Erdboden. An der Empfangsantenne kommen nicht nur die Wellen an die auf direktem Wege gesendet werden, sonder auch reflektierte Wellen. Je nach Gangunterschied dieser Wellen, der einer Phasenverschiebung entspricht, werden die auf direktem Weg ankommenden Wellen verstärkt oder gedämpft. Dieses Phänomen der Ortsabhängigkeit der Signalstärke wird als Fading bezeichnet. Um dieses Problem zu verringern wird im folgenden die Empfangsantenne auf eine höhere Position gesetzt, hier 1,05 m. Damit erhöht sich der Weg der reflektierten Signale, die somit stärker gedämpft werden.
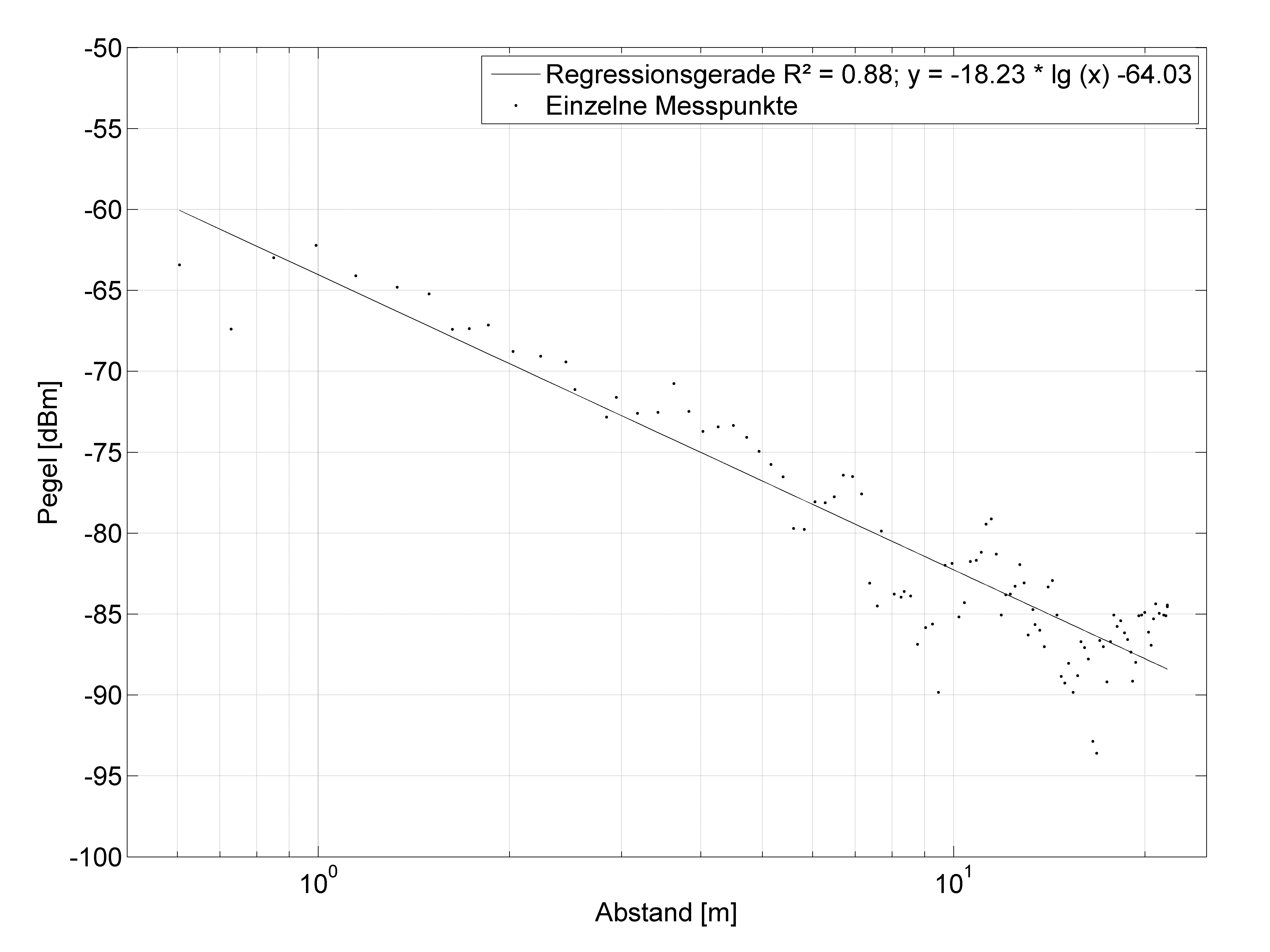
Dieses Diagramm zeigt nun eine Messung mit der weiter oben positionierten Empfangsantenne. Fading ist auch hier noch zu erkennen allerdings deutlich schwächer. Die hier ermittelte Regressionsgerade ist nun deutlich steiler und besitzt auch einen wesentlich höheren Determinationskoeffizienten. Diese Messungen eignen sich nun wesentlich besser für einen folgenden Abstandsschätzer.
Die beiden oben aufgeführten dynamischen Messszenarien wurden auch auf einer Messstrecke hinter dem LGS-Gebäude der HTW-Dresden durchgeführt bei der sich links und rechts in rund 5 m Entfernung Gebäude befanden, die die WLAN-Signale reflektierten. Die Ergebnisse dieser Messungen haben sich nur unwesentlich von den Messungen auf dem Feldweg unterschieden.
Abstandsschätzer
Zur Abstandsschätzung wird die Geradengleichung so umgeformt, dass der Abstand als Funktion der Signalstärke herauskommt:
[math]x=10^{\frac{y-b}{m}}[/math]
Die Parameter b und m werden durch Mittelung der entsprechenden Werte der dynamischen Messungen hinter dem LGS-Gebäude auf Höhe des Smartphones berechnet. Die Gleichung für die Abstandsschätzung lautet nun wie folgt:
[math]x=10^{\frac{y+61,85}{-17,44}}[/math]
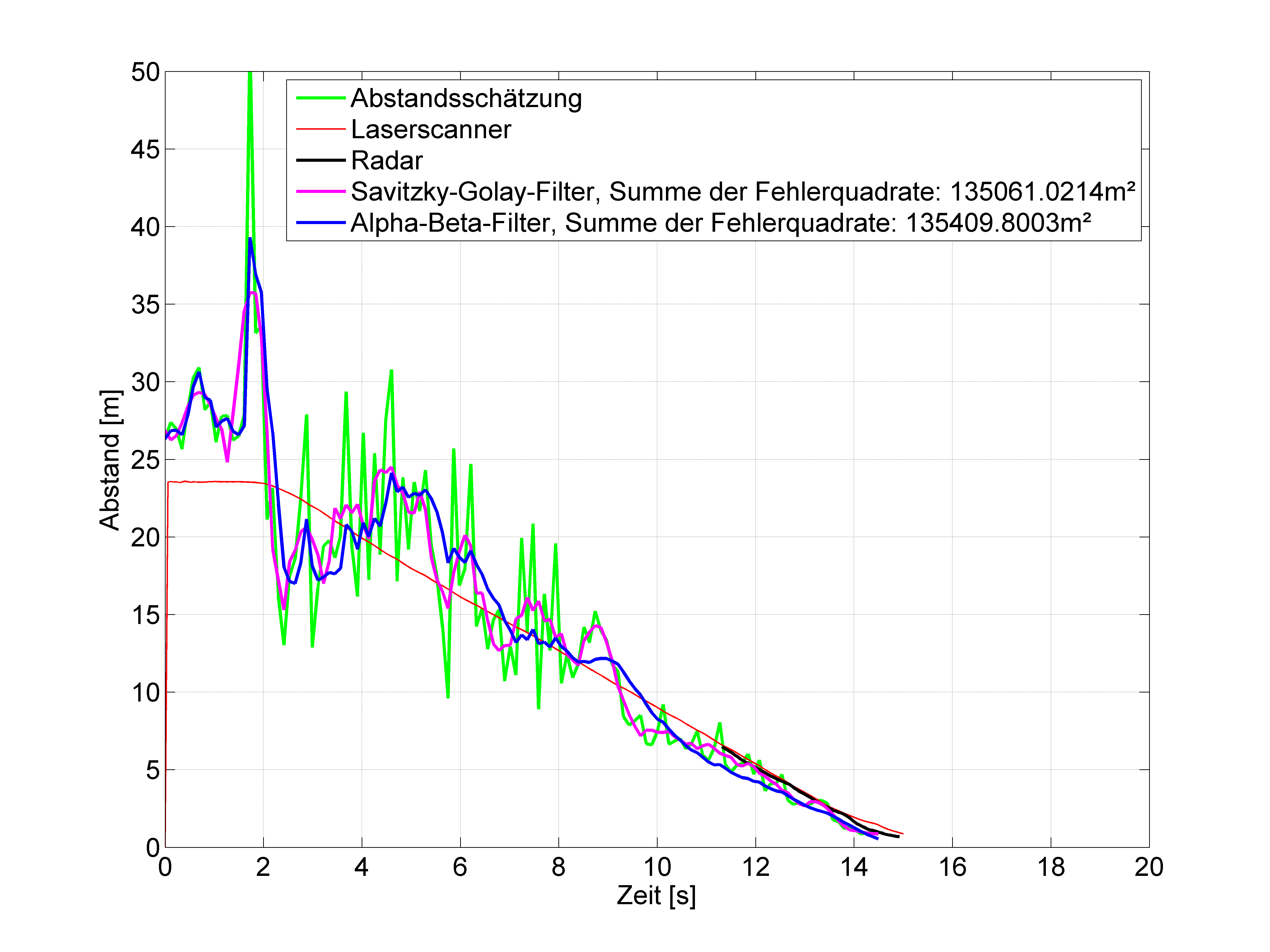
Dieses Diagramm zeigt nun eine nach obiger Formel erfolgte Abstandsschätzung. Die grüne Kurve stellt die rohen Daten dieser Abstandsschätzung dar. Zum Vergleich sind auch die genaueren Werte des Laserscanners zu sehen. In Diesem Diagramm sollen die Werte des RF-Explorers unabhängig von denen des Laserscanners dargestellt werden, deswegen wurde auf die weiter oben erwähnte Zeitsynchronisation verzichtet und angenommen das der RF-Explorer alle 0,115 s einen Messwert aufnimmt. Diese Zeitspannen entstammt der Analyse der zeitsynchronisierten Werte. Aufgrund dieser Unabhängigkeit der Messwerte von Laserscanner und RF-Explorer entstehen leicht unterschiedlich lange Messungen.
Aufgrund der starken Schwankung der Daten der Abstandsschätzung, müssen Filter angewandt werden um im Folgenden die Geschwindigkeit mittels Ableitung zu ermitteln. Die schwarze Kurve zeigt den sog. Savitzky-Golay-Filter. Hierbei wird ein Polynom durch mehrere Werte vor und nach dem aktuellen Punkt gelegt. Im obigen Fall ist dies ein Polynom dritten Grades und eine Fensterbreite von 9 Werten. Eine verdeutlichende Animation des Filters ist hier zu finden. Bei einer so geringen Fensterbreite und einem so stark schwankenden Wert hilft der Savitzky-Golay-Filter allerdings nicht viel, auch die gefilterten Werte schwanken noch so stark, dass eine Ableitung keinen Sinn macht. Daher zeigt die blaue Kurve Werte die mit einem Alpha-Beta-Filter ermittelt wurden. Dieser Zustandsschätzer schätzt anhand der abgeleiteten Geschwindigkeit und der aktuellen Position die zukünftige Position. Diese wird dann mit der nächsten gemessenen Position verglichen und anschließend werden geschätzte Position und Geschwindigkeit korrigiert. Desweiteren ist an obigem Diagramm sehr gut zu erkennen, dass mit steigender Annäherung an die Empfangsantenne die Genauigkeit der Abstandsschätzung stark steigt. Zum objektiven Vergleich der beiden Filter wurde die Summe der Fehlerquadrate berechnet als Abweichung von den Messwerten des Laserscanners. Dabei fällt auf, dass der Alpha-Beta-Filter eine geringfügig größere Abweichung besitzt als der Savitzky-Golay-Filter.
{kind=link}
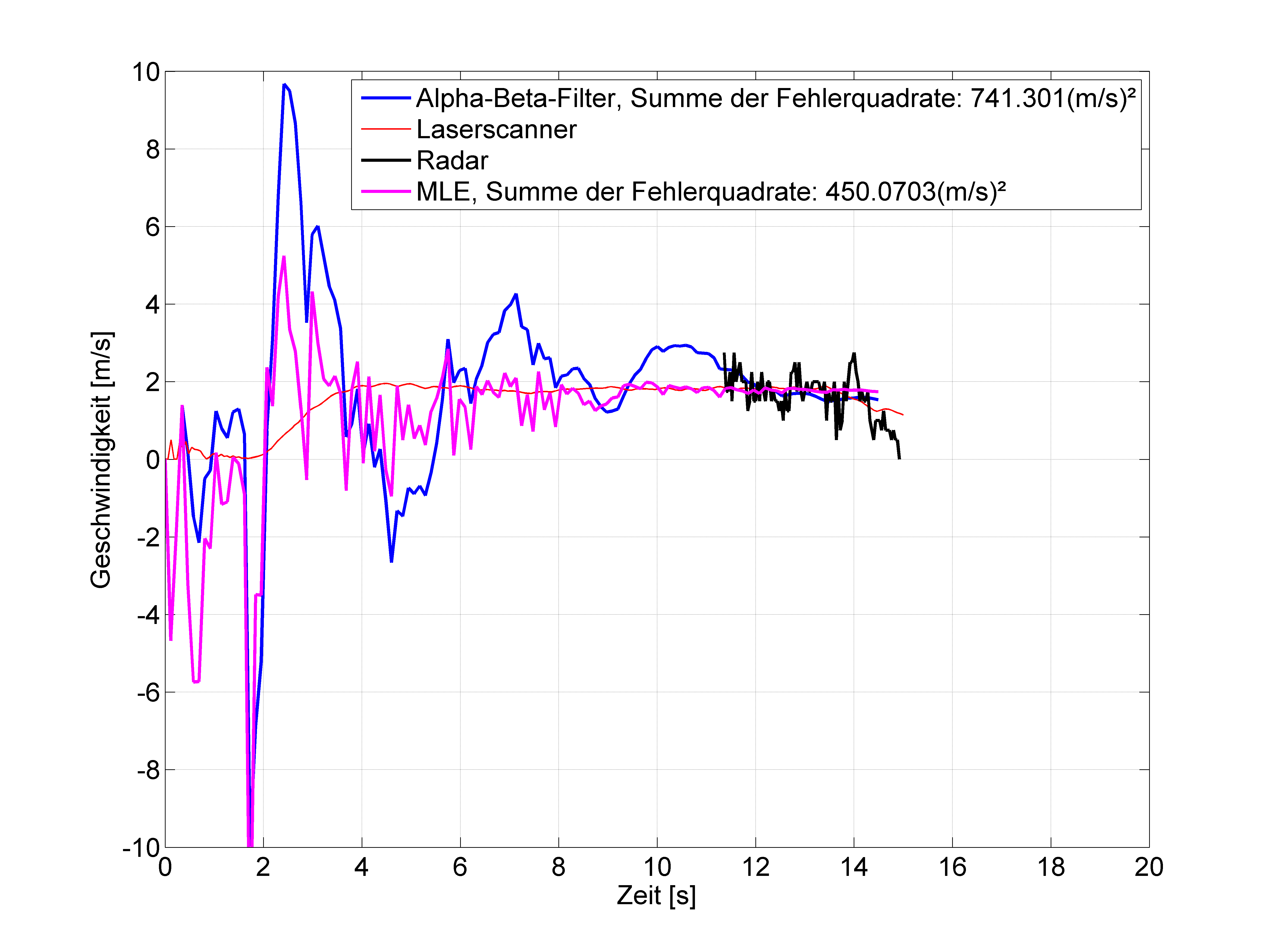
Dieses Diagramm zeigt nun die Geschwindigkeit die mit dem Alpha-Beta-Filter ermittelt wurde. Des weiteren ist die Referenzmessung des Laserscanners dargestellt. Außerdem wurde die Ableitung der Abstandsschätzung nach der Zeit mithilfe eines Maximum Likelihood Schätzers (MLE) geglättet und dargestellt. Aufgrund des großen Ausschlages am Anfang der Messung, der deutlich auf dem ersten Diagramm dieses Abschnittes zu erkennen ist, ergibt sich auch bei der Geschwindigkeit eine großer Ausschlag. Erst nach rund 5 s fangen die Filter an die Schwankung ordentlich zu kompensieren. Trotz aller Bemühungen schwankt der Geschwindigkeitswert immer noch beachtlich. Der nächste Schritt für ein Fahrerassistenzsystem zur Vermeidung von Kollisionen mit Radfahren ist die Berechnung eines möglichen Kollisionszeitpunktes, sodass dem Fahrer eines Kraftfahrzeugs mitgeteilt werden kann, wann mit einem Radfahrer zu rechnen ist. Für eine einfache Berechnung dieses Zeitpunktes wird im folgenden angenommen, dass der Fahrradfahrer mit konstanter Geschwindigkeit fährt:
[math]t={\frac{s}{v}}[/math]

Zur Kollisionszeitpunkberechnung wurden zum einen nur die Daten verwendet die durch den Alpha-Beta-Filter berechnet wurden und zum anderen wurden die Geschwindigkeitswerte des Maximum-Likelihood-Schätzer und die Abstandswerte des Alpha-Beta-Filters verwendet. Beide Methoden liefern erst gegen Ende der Messung brauchbare Ergebnisse. Bei der ausschließlichen Verwendung der Werte des Alpha-Beta-Filters sind die starken Pendelungen der Geschwindigkeitswerte zu erkennen, wohingegen die kombinierten Werte ein glatteres Ergebnis liefern.
Validierung des Modells
Zur Validierung wurden vier Szenarien überprüft. Bei all diesen Szenarien befand sich das Smartphone in der Hosentasche eines Fahrradfahrers. Dieser Fahrradfahrer ist zum einen mit konstanter Geschwindigkeit und zum anderen mit variierender Geschwindigkeit an der WLAN-Empfangsantenne vorbeigefahren. Des Weiteren wurden Messungen bei denen der Radfahrer hinter der Antenne angehalten hat, sowie Messungen bei denen sich der Fahrradfahrer senkrecht zur Antenne bewegt hat, aufgenommen. Die Ergebnisse dieser Messungen sollen nun zusammenfassend wiedergegeben werden.
Ein Fahrradfahrer der sich im Begriff befindet ein Auto zu überholen, kann relativ gut detektiert werden solange er sich mit relativ konstanter Geschwindigkeit bewegt. Sobald sich die Geschwindigkeit des Fahrradfahrers ändert kommt es zu starken Abweichungen zur tatsächlichen Position des Radfahrers. Ursache dafür sind die verwendeten Zustandsschätzer. Aufgrund der Tatsache, dass nur die stark verrauschte Signalstärke zur Abstandsschätzung herangezogen wird, kann die Geschwindigkeit nicht einfach mittels Ableitung ermittelt werden. Die Zustandsschätzer müssen nun Annahmen treffen, anhand derer sie die Geschwindigkeit schätzen, diese Annahme ist i.d.R. ein konstanter Geschwindigkeitswert.
Für alle Messungen bei denen sich ein Fahrradfahrer auf das Auto zubewegt ist zu erkennen, dass bei sinkendem Abstand die Genauigkeit der Schätzung stark ansteigt. Ab rund 10 m Abstand wird die Schätzung hinreichend genau. Trotz allem können noch Ausreißer auftreten oder es kann aus noch ungeklärten Gründen ein starker Offset zwischen Schätzung und Referenzmessung entstehen.
Ein weiteres Problem das auftreten kann, ist die Tatsache, dass ein kreuzender Fahrradfahrer als potentielles Kollisionsobjekt erkannt wird, da keine Bewegungsrichtung ermittelt werden kann und sich die Signalstärke aufgrund der Richtcharakeristik der Antenne je nach Winkel zwischen Antenne und Smartphone ändert.
Zusammenfassend lässt sich nun festhalten, dass sich eine Schätzung des Abstandes allein anhand der WLAN-Signalstärke als schwierig erweist. Es müssen noch weitere Informationen herangezogen werden um eine sichere Detektion eines Fahrradfahrers zu ermöglichen.
Konzept zur Datenfusion
Zur Datenfusion bieten sich besonders Radar-Sensoren an, die teilweise schon für Einparkassistenten verbaut sind. Diese Nahbereichs-Radarsensoren können Fahrradfahrer allerdings nur innerhalb weniger Meter sicher detektieren. Verwendet man nun diese Sensoren zur Validierung der WLAN-Daten, so bleibt nur ein sehr geringes Zeitintervall in dem eine kollisionsvermeidende Aktion durchgeführt werden kann. Eine Warnung des Fahrers wäre aufgrund mangelnder Reaktionszeit nicht sinnvoll.
Häufig entstehen Unfälle durch unvorsichtiges Türöffnen, woraufhin ein Fahrradfahrer mit dieser kollidiert. Ein entsprechendes Assistenzsystem das Radar- und WLAN-Daten kombiniert kann dies verhindern. Befindet sich das Fahrzeug im Stillstand und wird gleichzeitig ein sich näherndes WLAN-Signal erkannt, so kann dem Fahrer zunächst eine Meldung gegeben werden, er solle überprüfen ob es sicher ist die Tür zu öffnen. Erkennt nun der Radar-Sensor ein Objekt, mit ähnlicher Geschwindigkeit und ähnlichem Abstand so können die Türen automatisch verriegelt werden, wodurch der Fahrer nicht mehr die Möglichkeit hat den Fahrradfahrer zu gefährden.
Ein ähnliches Assistenzsystem, könnte bei geringen Geschwindigkeit eine Vollbremsung einleiten. Wird anhand von WLAN-Daten ein sich nähernder Fahrradfahrer erkannt, so können bei Geschwindigkeiten unter 20 km/h, die Bremsbacken an die Bremsscheiben angelegt werden. Zusätzlich muss nun noch eine Abbiegesituation erkannt werden, was anhand der aktivierten Fahrtrichtungsanzeiger ermittelt werden kann. Erkennt nun der Radar-Sensor ein ähnliches Objekt wie aus den WLAN-Daten hervorgeht, kann bei entsprechend niedriger Geschwindigkeit und vorliegender Abbiegesituation, eine Vollbremsung eingeleitet werden. Mit diesem System wäre es dem Fahrzeugführer nicht mehr möglich einen Fahrradfahrer zu gefährden, indem er ihm die Vorfahrt während des Abbiegens nimmt.