| Thema | Entwicklung eines Assistenzsystems zur Überwachung nicht einsehbarer Bereiche im Fahrzeugumfeld |
|---|---|
| Bearbeitungszeitraum | Dezember 2012 bis Mai 2013 |
| Betreuer | Prof. Dr. rer. nat. Toralf Trautmann Dipl.-Ing (FH) Erik Unger |
Aufgabenbeschreibung
Das Ziel dieser Diplomarbeit bestand darin, ein Fahrerassistenzsystem zu entwickeln, das Fahrradfahrer rechtzeitig im toten Winkel detektieren kann. So gilt es zukünftig Kollisionen zwischen Radfahrern und Kraftfahrzeugen bei Abbiegesituationen im Kreuzungsbereich zu verhindern. Die Erkennung der Fahrradfahrer sollte mittels Radarsensoren umgesetzt werden. Die verwendeten Radarsensoren wurden bereits für das PARKTRONIC-System und das Adaptive-Cruise-Control in der S-Klasse von Mercedes Benz eingesetzt.
Ergebnisse
Messung von Fahrradfahrern
Zunächst musste die Eignung der Sensorik für die Zielapplikation überprüft werden. Dafür mussten zunächst Messungen durchgeführt werden, die der oben beschriebenen Verkehrssituation entsprechen.
Die Sensorik wurde am Heck der Beifahrerseite eines Messfahrzeugs montiert. Dafür wurde eigens eine Messtechnikhalterung konstruiert. Die Halterung wurde so konzipiert, dass sie an einen ursprünglich für Fahrräder ausgelegten Heckträger befestigt werden kann.
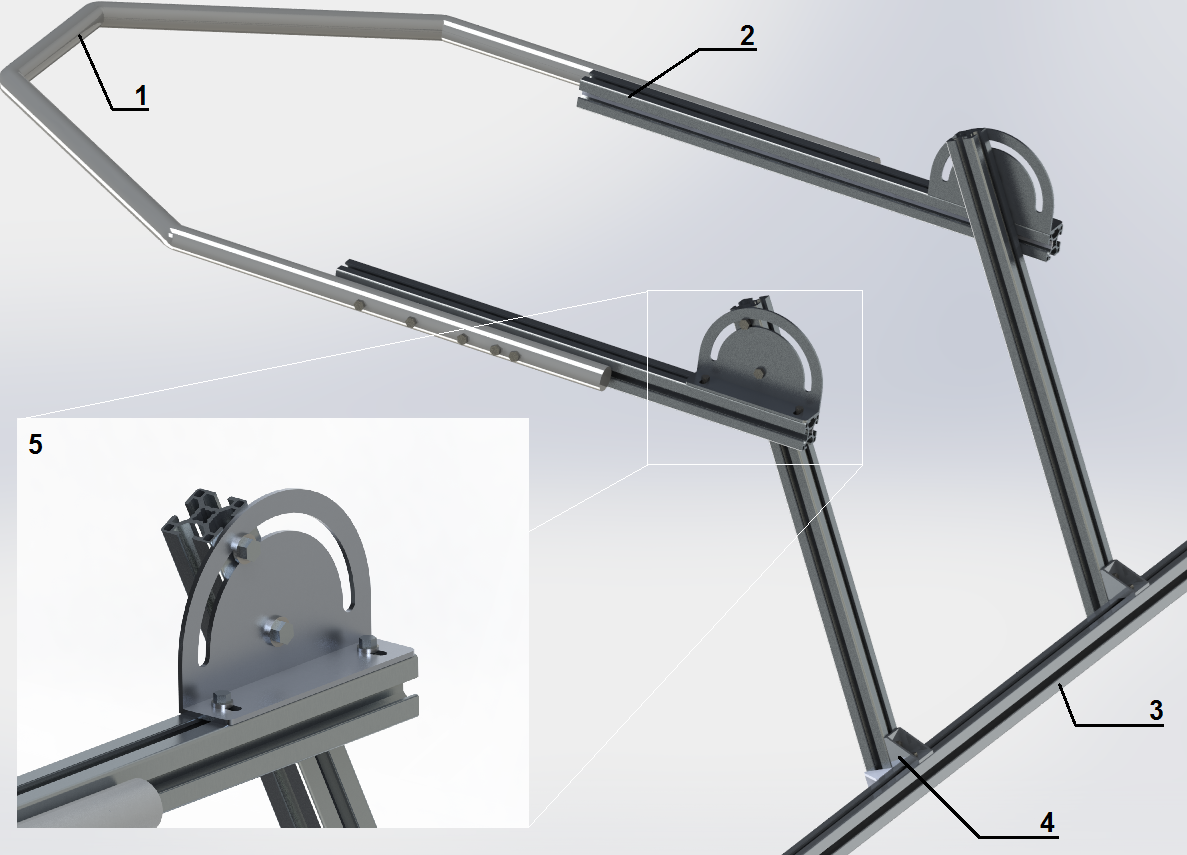
Die obere Abbildung zeigt die in CAD konstruierte Halterung. Die folgende Teileliste gibt Aufschluss über die einzelnen Komponenten der Halterung:
Bauteil 1: |
Querbügel des Heckträgers – ohne Abbildung des ursprünglichen Fahrradständers |
Bauteil 2: |
30 mm Strebenprofil von Bosch Rexroth (Länge 500 mm), 4x |
Bauteil 3: |
30 mm Strebenprofil von Bosch Rexroth (Länge ca. 1700 mm), 1x |
Bauteil 4: |
30 mm Winkel von Bosch Rexroth, 4x |
Bauteil 5: |
Schwenkbefestigung 180 ° von Bosch Rexroth, 2x |
Die Befestigung der Sensoren erfolgt über Bauteil 3 durch eine Kombination aus Universalhalterung und Lochplatte. Durch die Universalhalterung können die Sensoren beliebig ausgerichtet werden und mit der Lochplatte besteht die Möglichkeit verschiedenste Sensoren zu montieren.
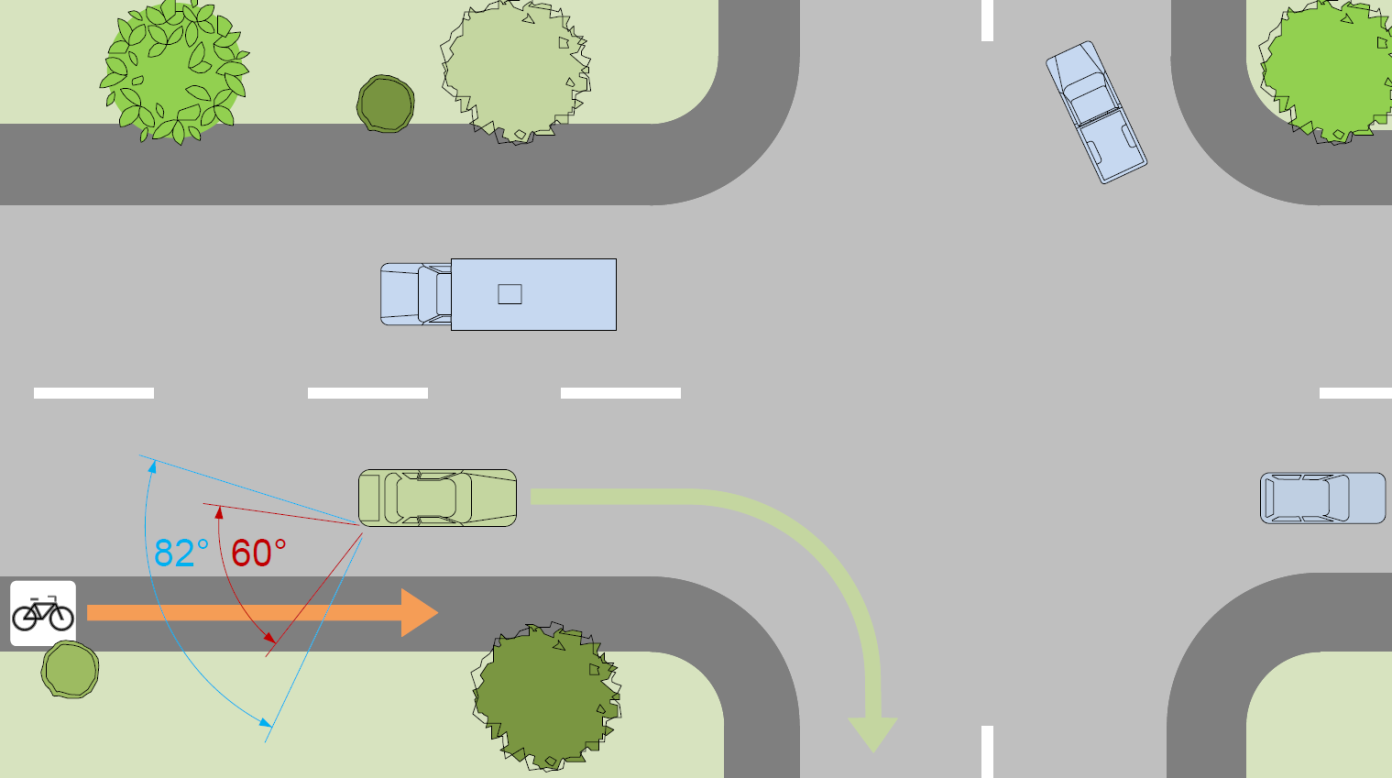
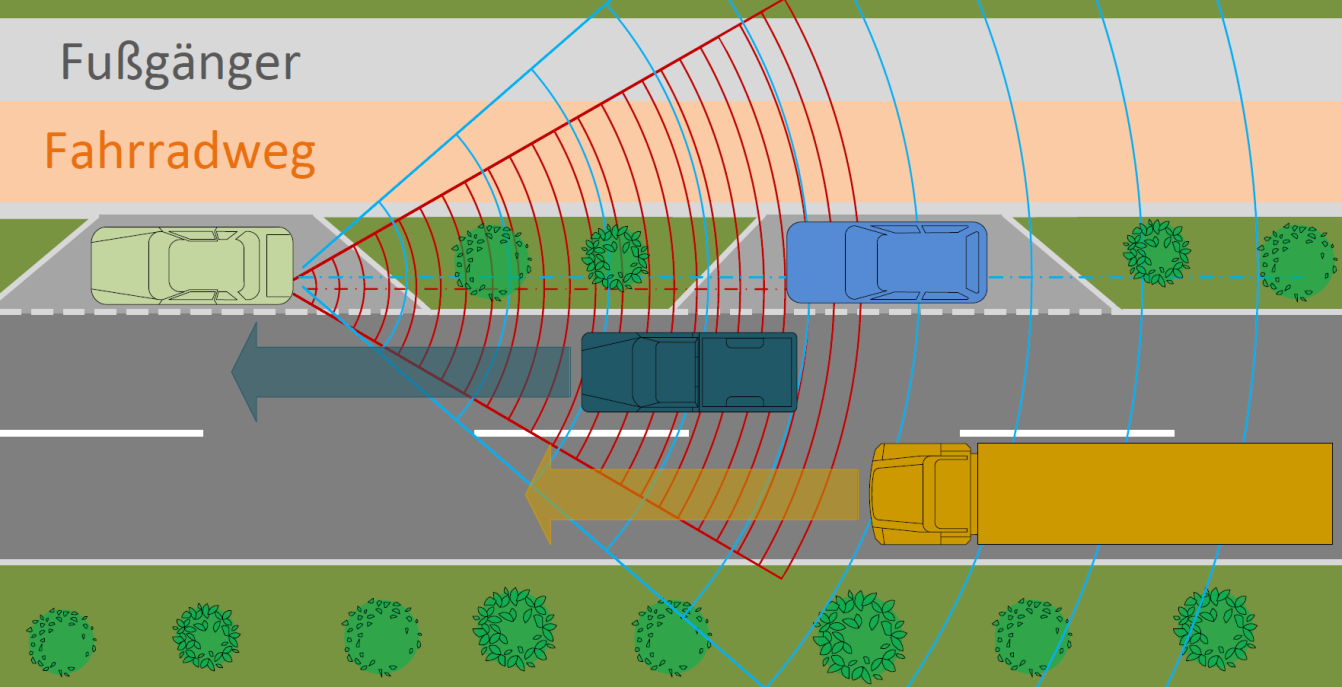
Der Ausrichtungswinkel des Sensors wurde so angepasst, dass sein horizontaler Öffnungswinkel (60°) bei den Messungen optimal ausgenutzt werden konnte. Dazu wurde parallel zur Messung mit dem Radarsensor ein Laserscanner (Hella IDIS V2.0, horizontaler Öffnungswinkel 82°) verwendet um Vergleichsmessdaten für die spätere Auswertung zu erhalten. In der unteren Abbildung ist die beschriebene Verkehrssituation skizziert.
Bei den Messungen fuhr ein Fahrradfahrer parallel zur Beifahrerseite am Messfahrzeug vorbei. Das Ergebnis der mit dem Radarsensor aufgenommenen Messdaten ist in der folgenden Abbildung verdeutlicht.
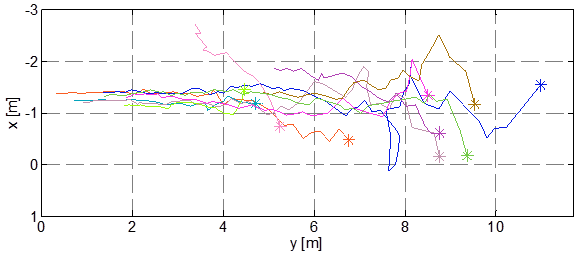
Die Position der Sensorik befindet sich im Koordinatenursprung. Jede einzelne Messung wurde durch eine andere Farbe gekennzeichnet. Der Beginn der Detektion des Radfahrers durch den Radarsensor ist jeweils durch ein Sternchen markiert.
- Die früheste Detektion des Radfahrers variiert stark zwischen einzelnen Messungen
- Bei mehreren Messungen wird der Radfahrer nach Beginn der frühesten Detektion nicht durchgängig erkannt
- Streuung der x-Koordinaten nimmt mit ansteigender Entfernung zu
- Die Detektionsgüte ist abhängig vom Werkstoff des Fahrradrahmens und vom Ausrichtungswinkel des Sensors um die Fahrzeughochachse
- Im Durchschnitt wird der Fahrradfahrer nicht rechtzeitig erkannt, sodass eine Gefahrenabwendung durch ein Assistenzsystem nicht mehr durchführbar wäre
Absatz
Zum Vergleich sind die Messdaten des Laserscanners in folgender Abbildung denen des Radarsensors gegenübergestellt.
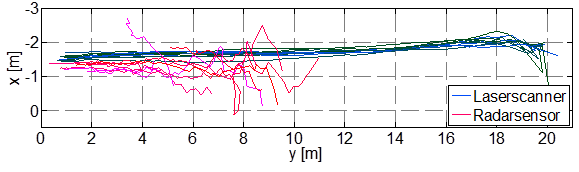
Zusammenfassend kam man zu dem Schluss, dass die Leistungsfähigkeit des Radarsensors nicht die Voraussetzungen der Zielapplikation erfüllt. Der Laserscanner hingegen wäre hervorragend für den Abbiegeassistenten geeignet. Hierfür müsste das Preisniveau des Scanners dem des Radarsensors entsprechen. Bis jetzt befindet sich der Laserscanner allerdings noch im Stadium eines Prototypen.
Absatz
Absatz
Messung von Kraftfahrzeugen
Auf Grundlage dieser Erkenntnisse wurden Messungen von Kraftfahrzeugen im Straßenverkehr durchgeführt. Die daraus gewonnenen Messdaten sollen Aufschluss über die qualitativen Unterschiede zwischen detektierten Fahrradfahrern und Kraftfahrzeugen liefern.
Für diese Messung wurde das Messfahrzeug in einer Parkbucht abgestellt. Hierbei befand sich die Sensorik am Heck des Fahrzeugs auf der Fahrerseite und nahm den vorbeirollenden Kraftfahrzeugverkehr auf. Die Sensoren wurden gerade nach hinten ausgerichtet. In der unteren Abbildung ist die Vorgehensweise der Messung schematisch dargestellt.
Die Gegenüberstellung der Messdaten von Fahrradfahrer und Kraftverkehr ist in der folgenden Abbildung zusammen geführt worden.
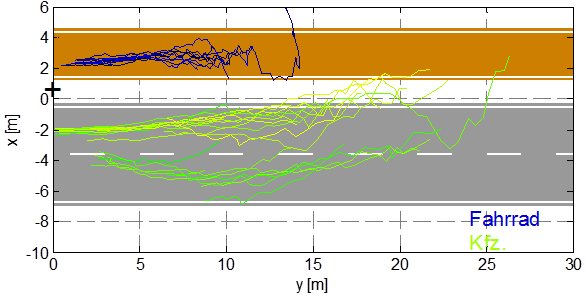
Das schwarze Kreuz markiert die Position der Sensorik, Straße und Fahrradweg sind zur Veranschaulichung hinterlegt worden. Der qualitative Unterschied der Detektionsgüte von Fahrradfahrern und Kraftfahrzeugen wird sofort ersichtlich:
- Kraftfahrzeuge werden deutlich früher detektiert
- Die Detektion eines Kraftfahrzeugs erfolgt durchgängig
Absatz
Analog zu den Messungen von Fahrradfahrern treten auch hier folgende Probleme auf:
- Abweichung der frühesten Erkennung pro detektiertem Kfz.
- Zunehmende Streuung der x-Koordinaten mit ansteigender Entfernung
Absatz
Weiterhin sind bei diesen Messungen neben den typischen Verläufen der Kfz. auch nicht eindeutig identifizierbare Objekte aufgetreten. Diese beiden Objekttypen sind in der unteren Draufsicht als Animation exemplarisch dargestellt.
Das mit der ID 1 zugeordnete Objekt entspricht einem vorbeifahrenden Kraftfahrzeug. Weiterhin erkennt der Radarsensor ein Objekt, welches mit der ID 2 belegt wird. Dabei handelt es sich um ein nicht eindeutig identifizierbares Objekt, denn die Videoanalyse der Messung ergab, dass sich an dieser Stelle kein Gegenstand befand. Bei dem Objekt mit der ID 0 handelt es sich um ein Verkehrsschild, welches auf der Beifahrerseite schräg hinter dem Messfahrzeug stand.Absatz
Absatz
Absatz
Algorithmus zur Objekttypenzuordnung
Aus der Messdatenauswertung der Messung von Kraftfahrzeugen ergibt sich die Notwendigkeit, die zwei auftretenden Objekttypen mittels eines Algorithmus eindeutig voneinander unterscheiden zu können. Zunächst wurden dafür alle detektierten Objekte in einer Datenbank hinterlegt. Es folgte eine händische Untersuchung aller Objekte, bei der diese in zwei Kategorien (Typ 1 für Kfz., Typ 2 für nicht identifizierbar oder zu kurz detektiert) unterteilt wurden.
Für einen Algorithmus besteht die Notwendigkeit, die Objekte mathematisch voneinander abzugrenzen. Dafür mussten die Messdaten der kategorisierten Objekte zunächst in zwei Grundgesamtheiten zusammengefasst werden. In einer Erhebung der Grundgesamtheiten sind danach charakteristische Messgrößen untersucht und zwischen den Objekttypen verglichen worden.
Bei diesen Messgrößen handelt es sich um die Geschwindigkeit, die Gierrate und den Gierwinkel pro Messpunkt. In der folgenden Abbildung sind die vom Radarsensor aufgenommenen Messdaten der Gierwinkelwerte der beiden Objekttypen als Beispiel dargestellt:
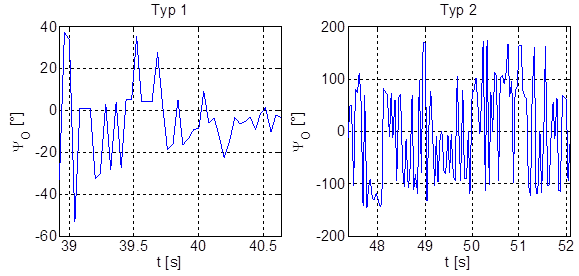
Bei dem Gierwinkel handelt es sich um den Richtungswinkel des Objektgeschwindigkeitsvektors pro Messpunkt (-180° < ψO < 180°). Die unterschiedlich stark ausfallende Streuung der Messwerte unter den Objekttypen ist sehr auffällig. Deshalb wurde bei der Erhebung die korrigierte Stichprobenvarianz der charakteristischen Messgrößen pro Objekt untersucht. Für ein Objekt, welches über einen endlichen Detektionszeitraum (n Messwerte) erkannt wird berechnet sich diese am Beispiel des Gierwinkels zu:
[math] \sigma^{2}_\Psi = \frac{1}{n-1} \sum_{i=1}^{n} (\Psi_i -\bar\Psi)^{2} [/math]
In der folgenden Abbildung sind die Varianzen der beiden Beispielobjekte dargestellt:
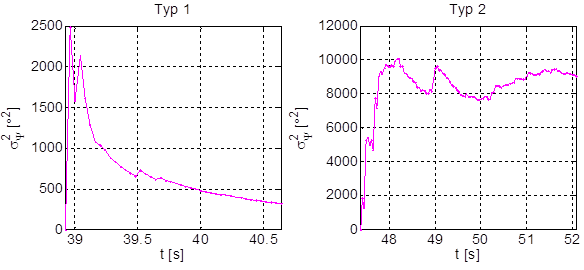
Es ist zu erkennen, dass die Varianz beim Objekt Typ 1 eine abnehmende Tendenz aufweist, während die Werte beim Typ 2, nachdem sie sofort stark angestiegen sind auch einen hohen Wert bis zum Detektionsende beibehalten. Dieser Sachverhalt lässt sich auch bei allen anderen 424 Objekten wiederfinden.
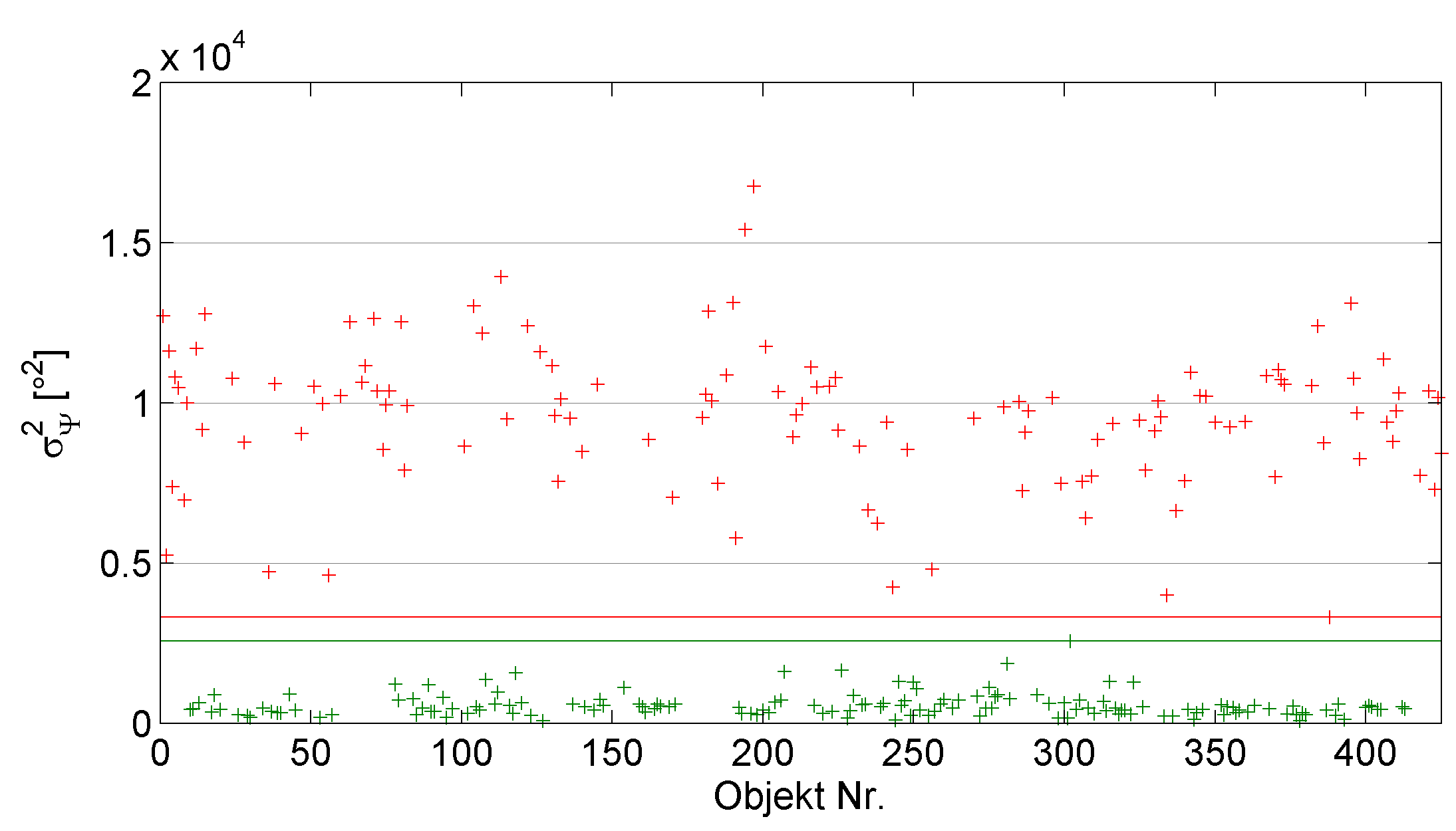
In der oberen Abbildung ist die Varianz des Gierwinkels pro Objekt (über gesamten Detektionszeitraum) dargestellt. Grün markiert sind Objekte, welche in der händischen Auswertung als Typ 1 eingestuft wurden und rot markiert sind dementsprechend alle Objekte vom Typ 2. Es ist gut zu erkennen, dass die beiden Objekttypen durch die Varianz des Gierwinkels eindeutig voneinander abgrenzbar sind. Die Grüne Linie stellt die Obergrenze der Varianz des Gierwinkels vom Typ 1 dar. Demgegenüber verkörpert die rote Linie die Untergrenze der Objekte vom Typ 2.
Mit der Erhebung konnten bei den charakteristischen Messgrößen eindeutige objektspezifische Grenzwerte ermittelt werden (vgl. rote und grüne Linie in vorangeschrittener Abbildung). Das bedeutet, dass jedes Objekt mit den Mitteln der mathematischen Statistik eindeutig seinem Typ zugeordnet werden kann. Dadurch war es möglich mit MATLAB einen Algorithmus zu schreiben, in den die Grenzwerte als Indikatoren eingebunden wurden. Jedes Objekt kann somit anhand der Grenzwerte nach einer minimalen Detektionszeit von 0,56 Sekunden eindeutig zugeordnet werden. Objekte, die den minimalen Detektionszeitraum unterschreiten, werden als Typ 2 eingeordnet.
Nach Abschluss der Arbeit
Untersuchungen zur Möglichkeit der Anwendung des Algorithmus zur Objekttypenzuordnung bei der Detektion von Fahrradfahrern
Der Algorithmus zur Objekttypenzuordnung ermöglicht die eindeutige Unterscheidung zwischen detektierten Kraftfahrzeugen und nicht identifizierbaren Objekten. Dieses Kapitel beschäftigt sich mit der Anwendung des Algorithmus auf detektierte Fahrradfahrer und der Möglichkeit, auch diese von nicht definierbaren Objekten zu unterscheiden. Verwendet man die bisherige Parametrierung (mit ermittelten Grenzwerten aus Kfz.-Messung), so weist der Algorithmus eine Fehlerrate auf, die mit Erhöhung der minimalen Detektionszeit sogar steigt (bei 0,56 s 11,31%; bei 1 s 18,42%). Deshalb muss der Algorithmus neu parametriert werden.
Für die Neuparametrierung wird eine größere Menge an Daten von detektierten Fahrradfahrern benötigt. Um eine große Datenmenge zu sammeln wurde eine umfangreiche Messung an einem Fahrradweg durchgeführt.
Bei der Messung fuhren insgesamt 172 Fahrradfahrer am Radarsensor vorbei. Der Sensor selbst detektierte insgesamt 380 Objekte. Zum Schluss konnten, mit einer minimalen Detektionszeit von 0,56 s und eindeutig als Fahrradfahrer identifiziert, nur die Messdaten von 64 Objekten in die Grundgesamtheit Typ 1 aufgenommen werden. Das bedeutet, dass manche Fahrradfahrer nicht detektiert bzw. eine größere Anzahl hinter- oder nebeneinander befindlicher Fahrradfahrer nur als ein Objekt erkannt wurden. Die Messdaten der nicht identifizierten Objekte mit einer minimalen Detektionszeit von 0,56 s wurden in die Grundgesamtheit Typ 2 aufgenommen.
Wie bereits mit den Messdaten aus der Kraftfahrzeugmessung, wurden auch hier wieder die Grundgesamtheiten auf dieselben charakteristischen Messgrößen untersucht.
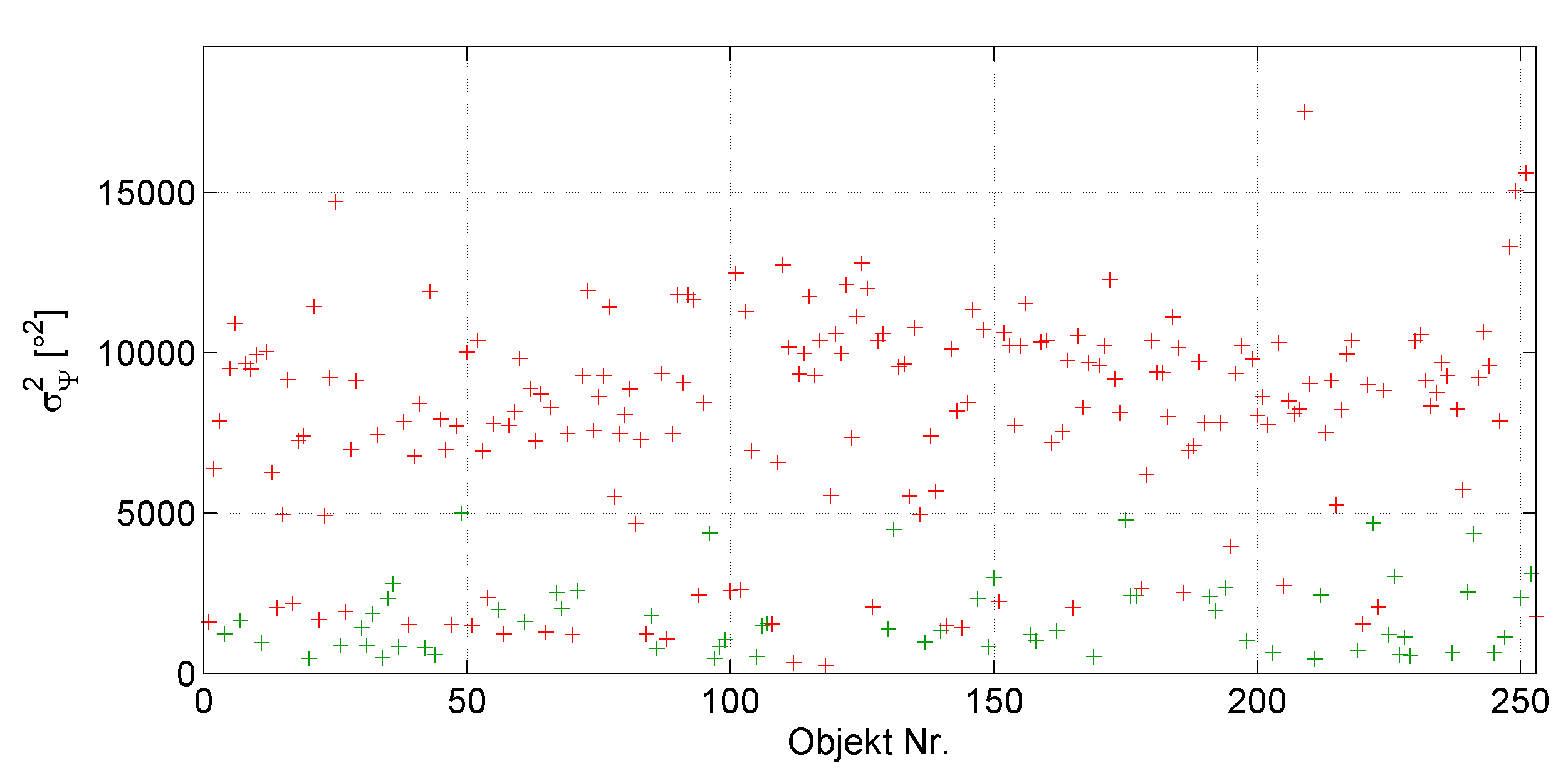
In der oberen Abbildung ist für jedes Objekt die Varianz des Gierwinkels dargestellt. Relevant für die Erhebung waren alle Objekte, die länger als 0,56 s detektiert wurden. Grün markiert sind die Objekte, welche zuvor als Fahrradfahrer kategorisiert wurden. Rot markiert sind statische Objekte und nicht zuordenbare Reflektionen. Aufgrund der starken Durchmischung der Varianzen existieren keine Grenzwerte zur Unterscheidung der Objekttypen. Dieses Verhalten trifft auch auf die Varianz der Gierrate zu, welche im Algorithmus als Sekundär- bzw. Vergleichsindikator eingesetzt wird. Die Parametrierung des Algorithmus zur Objekttypenzuordnung auf Fahrradfahrer ist deshalb mit dieser Herangehensweise nicht möglich.