1st BMVI Pitch – wir waren dabei
März 30, 2017
0 Comment

Mit unserem Projekt „openHADMaps – freie Karten für das automatisierte Fahren“ haben wir am ersten BMVI Pitch für StartUps teilgenommen. Zusammen mit 32 größtenteils schon gegründeten Unternehmen haben wir unser Projekt einer hochkarätigen Jury in 3 min vorgestellt.
Weiterlesen →Christoph Scharnagl – Masterarbeit erfolgreich verteidigt
März 27, 2017

Am 27.03.2017 hat Herr Christoph Scharnagl seine Masterarbeit zum Thema „Inbetriebnahme und Charakterisierung der Leistungsparameter von Funkmodulen für Ad-hoc Netzwerke“ erfolgreich verteidigt. Mit der Arbeit hat Herr Scharnagl einen ersten Ansatz für ein Messkonzept vorg
Weiterlesen →Diplomarbeit erfolgreich verteidigt
März 18, 2017

Am 16.03.2017 hat Herr Christopher Dunkel seine Diplomarbeit zum Thema „“ erfolgreich verteidigt. Die Arbeit ist der erste Meilenstein im Projekt „Platooning“. Jetzt sind die grundlegenden Möglichkeiten der Ansteuerung des Renault-Twizy implementiert, so dass i
Weiterlesen →openHADMaps im Finale des BMVI StartUp Pitch
März 13, 2017

Mit unserem Projektvorschlag openHADMaps stehen wir im Finale des ersten BMVI StartUp Pitch. Am 29.3. werden wir unsere Idee im Bundesministerium für Verkehr und Digitale Infrastruktur (BMVI) präsentieren. Unter der Leitung von Herrn Dobrindt haben wir die Chance in 3 Minuten den Kern
Weiterlesen →openHADMaps – Bewerbung beim ersten BMVI StartUp Pitch
März 10, 2017

Mit dem Thema Open Maps for Highly Automated Driving (openHADMaps) haben wir uns beim ersten BMVI StartUp Pitch beworben. Basierend auf OSM Karten, soll über ein erweiterten Layer essentielle Informationen die für das hochautomatisierte Fahren ergänzt werden.
Weiterlesen →Augmented Reality im Prüf- und Testprozess
März 10, 2017

Im Rahmen einer Kooperation zwischen CASONEX und mechlab werden neue Strategien und Konzepte zur Mensch-Maschine-Interaktion untersucht. Im ersten Schritt haben wir uns dem Thema Qualitätssicherung im Fertigungsprozessen und dem des Testens von Fahrerassistenzsystemen über ein mobiles
Weiterlesen →Diplomarbeit erfolgreich verteidigt
Februar 03, 2017

Am 03.02.2017 hat Herr Yeyi Qiu (laborinterner Deckname „Finn“) seine Diplomarbeit zum Thema „Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen“ erfolgreich verteidigt. Er ist Teilnehmer des 2+3 Austauschprogramms mit der Universität Hangzhou. D
Weiterlesen →Messfahrt Velodyne VLP-16
Januar 16, 2017
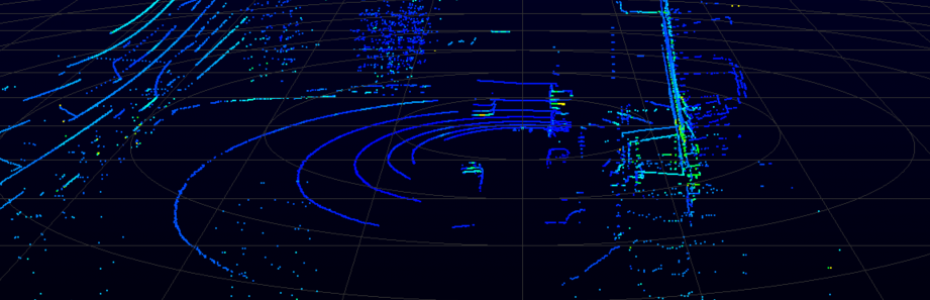
Mit einem horizontalen Öffnungswinkel von 360° und einem vertikalen Öffnungswinkel von 30°, erstellt der Velodyne VLP 16 LiDAR eine Abbildung des Umfeldes mit ca. 300000 Punkte pro Sekunde. Die Klassifikation und das Tracking der Objekte ist eine der Aufgaben im Nives Projekt.
Weiterlesen →Ampelassistenz erfolgreich getestet
Dezember 22, 2016

Das im Labor für Kfz-Mechatronik (MechLab) neu entwickelte Ampelmodul konnte jetzt seine volle Funktionsfähigkeit nachweisen. Durch ein WLAN Ad-hoc-Netzwerk auf Basis des Standards IEEE 802.11p werden die aktuelle Ampelphase, die Restlaufzeit und eine lokale Karteninformation an alle
Weiterlesen →Lichtschranken Messanlage mit CAN Anschluss in Betrieb genommen
Dezember 20, 2016

Lichtschranken Messanlage in Betrieb genommen. Erste Testmessung im Technikum der HTW Dresden. Als Versuchsfahrzeug wurde ein Elektroroller genutzt. Die visualisierte Ausgabe der CAN Signale erfolgte im Program CANoe. Lichtschranken Messanlage mit 12 Lichtschranken der Firma Leuze . D
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de