Koreanische Delegation und VDI zu Besuch
Mai 23, 2018
0 Comment
Am 22.05.18 besuchte eine Delegation der südkoreanischen Straßenverkehrsbehörde (Korea Transportation Safety Authority) das Mechlab-Team. Unter Führung von Behördenpräsident Byung Yoon Kwon gab es einen regen Erfahrungsaustausch zu aktuellen und künftigen Prüfmöglichkeiten für Fahrera
Weiterlesen →ROS RC-Car: Autonomes Fahrzeug im kleinen Format
April 26, 2018
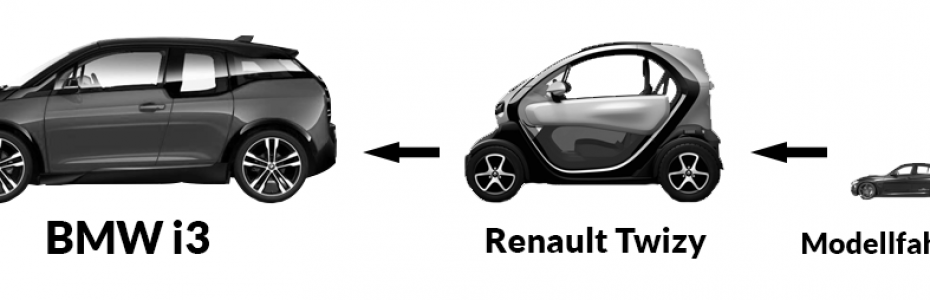
Die Idee Eines der langfristigen Ziele der Forschungsgruppe NIVES ist die Evaluation und Fusionierung von Sensorik für autonome Fahrfunktionen. Dafür besitzt die Hochschule bis dato zwei Fahrzeuge, einen BMW i3 und einen Renault Twizy. Beide Fahrzeuge sind bereits zum Teil mit Sensore
Weiterlesen →Besuch Berufsschulklasse aus Nordhausen
April 24, 2018

Im Rahmen der Nachwuchsförderung haben uns heute 25 Auszubildende der Kfz-Mechatronik im zweiten Lehrjahr von der Berufsschule Nordhausen besucht. Kernthemen waren die Vorstellung unserer Versuchsfahrzeuge BMW i3 und Renault Twizy mit der verbauten Messtechnik und Umfeldsensorik, sowi
Weiterlesen →Mechlab-Team gibt erstmals VDI-Schulung
März 12, 2018

Am 13.03.2018 findet die erste VDI-Schulung des Mechlab-Teams unter Leitung von Prof. Dr. rer. hat. Toralf Trautmann statt. Unter dem Titel „Umfeldsensorik im Fahrzeug“ erhalten die Teilnehmer einen Einblick in aktuelle und künftige Sensoren für die Erkennung des Fahrzeugu
Weiterlesen →Inbetriebnahme des SICK LD-MRS Laserscanners am Renault Twizy
März 05, 2018
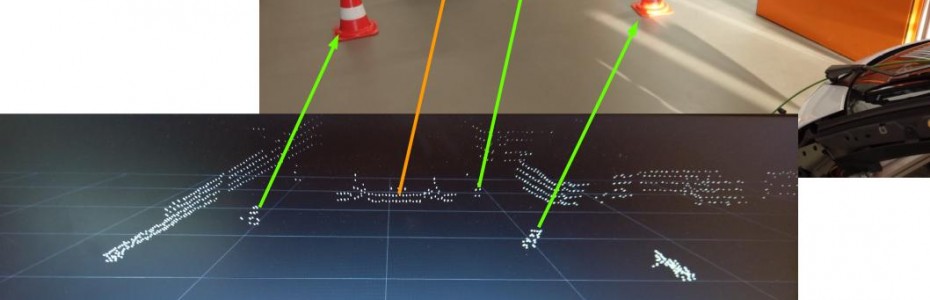
Der SICK LD-MRS400102 HD Laserscanner ermöglicht eine Detektion von Hindernissen über einen Arbeitsbereich von 110° und 4 Ebenen. Der Sensor soll denn bisher im Renault Twizy verwendeten Hella Idis Laserscanner ersetzen und u. a. in den Projekten Platooning und GEwAF sowie weiteren in
Weiterlesen →MDR-Kurzbeitrag
Januar 24, 2018
Der Verkehrsgerichtstag 2018 in Goslar beschäftigt sich unter anderem auch mit den Entwicklungen im Bereich des automatisierten Fahrens. Der MDR hatte hierzu einige Fragen an das Mechlab-Team und hat den aktuellen Arbeitstand in einem kurzen Beitrag festgehalten. Dieser lief am 20.01.
Weiterlesen →ASAM International Conference 2017
Dezember 08, 2017

Unter dem Motto „Autonomous Driving – Big Testing and Big Data as the Next Challenge“ tagte vom 06-07.12 die ASAM International Conference 2017 im Dresdner Congress Center. Auch das Team mechlab war mit einem eigenen Stand vertreten und zeigte anschaulich, wie die Pl
Weiterlesen →ROS Rviz – 360° LiDAR – Punktwolken Verdichtung
November 21, 2017

Im Rahmen des Forschungsprojektes „NIVES“ wird die Nutzung und Fusion verschiedener Sensoriken am Fahrzeug zur teils vollständigen Automatisierung von Fahrfunktionen untersucht. Dabei ist eine detaillierte Erfassung der Umgebung von besonderer Wichtigkeit. Mithilfe eines 3
Weiterlesen →Mechlab-Diplomthemen
November 06, 2017
Die folgenden Diplomthemen stehen für Studenten der Fahrzeugtechnik und der Fahrzeugmechatronik zur Verfügung: Mechlab_DA_2018_2 Bei Interesse bitte e-mail an trautmann@htw-dresden.de
Weiterlesen →Erstes Praktikum auf dem Prüffeld
Oktober 28, 2017
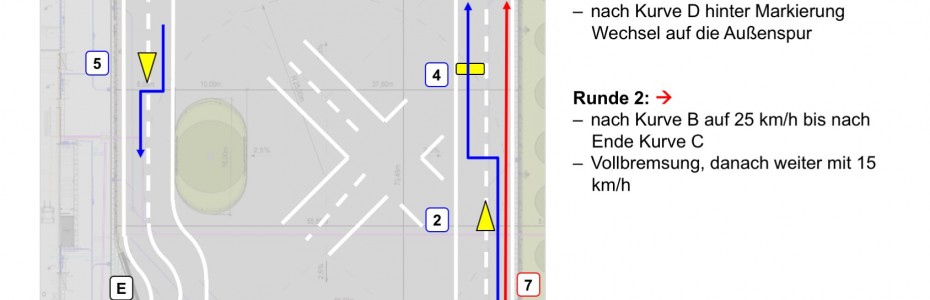
In der Kalenderwoche 43 startete das neue Praktikum im Rahmen der Vorlesung „mechatronische Grundlagen“ für das 3. Semester der Fahrzeugtechniker. Die Studierenden konnten erstmals das Prüffeld für vernetzte und automatisierte Fahrfunktionen im Einsatz erleben. Jeder Student mit gülti
Weiterlesen →
Die Fakten sprechen für uns.
© Copyright 2019 | mechlab.de